本发明提供了某种基于动态调度的自动化码垛系统和方法。本发明将仓库包括若干库区,各库区具有若干仓位,码垛机器人可在所述仓库自由活动,根据码放物品的属性、库区实时状态、码垛机器人工作状态,动态调度所码垛机器人并控制所述码垛机器人执行码垛操作,其中,所述码放物品的属性包括码放物品的体积,所述库区实时状态包括库位是否空闲,所述码垛机器人工作状态包括码垛机器人是否静止,本发明针对具体布局的仓库动态调度码垛机器人,码垛效率更高,且码垛机器人上夹持货物部分悬空设置,可以阻断码垛机器人再行走和搬运过程中对货物造成的影响,特别时是对于精密件和贵重件的运输,有重要意义,很具应用前景。
1.某种基于动态调度的
自动化码垛系统,包括输送子系统、码垛子系统、调度子系统、仓库子系统,所述输送子系统包括码放物品入库输送线和码放物品出库输送线,所述仓库子系统包括仓库,所述仓库具多个仓库实时状态,所述仓库包括若干库区,各库区具有若干仓位,所述码垛子系统包括码垛机器人,所述码垛机器人可在所述仓库自由活动,所述码放物品入库输送线用于将码放物品输入至库或从仓库输出,所述调度子系统根据码放物品的属性、仓库实时状态和码垛机器人工作状态,动态调度码垛机器人并控制码垛机器人执行码垛操作,其特征在于,所述库区包括第一码垛库区、第二码垛库区、第三码垛库区、第四码垛库区,所述仓库实时状态包括第一状态、第二状态、第三状态和第四状态,所述第一状态包括第三码垛库区或第四码垛库区有空闲仓位并且码放物品入库输送线处于空闲状态,所述第二状态包括第三码垛库区或第四码垛库区有空闲仓位并且码放物品入库输送线不处于空闲状态,所述第三状态包括第三码垛库区和第四码垛库区没有空闲仓位并且第一码垛库区或第二码垛库区有空闲仓位,所述第四状态包括第一码垛库区、第二码垛库区、第三状态和第四码垛库区均没有空闲仓位,所述自动化码垛系统还包括识别子系统,所述识别子系统实时识别仓库实时状态,所述调度子系统配置为若仓库子系统处于第一状态,则将货物在第三码垛库区或第四码垛库区进行入库,若仓库子系统处于第二状态,则当第一码垛库区或第二码垛库区有空闲仓位时,在第一码垛库区或第二码垛库区进行入库,当第一码垛库区或第二码垛库区没有空闲仓位时,等待码放物品入库输送线处于空闲状态,将货物在第三码垛库区或第四码垛库区进行入库,若仓库子系统处于第三状态,则将货物在第一码垛库区或第二码垛库区进行入库并且第一码垛库区或第二码垛库区的货物优先于第三区域和第四区域的货物出库,若仓库子系统处于第四状态,则码放物品入库输送线停止让待入库的货物进入,若仓库子系统处于第三状态,则当同时有入库和出库任务时,码垛机器人优先执行入库任务,码垛机器人均设置有定位装置,所述调度子系统根据码垛机器人的工作状态和/或实时位置调度响应地的码垛机器人执行码垛操作,所述工作状态包括静止状态和运动状态。
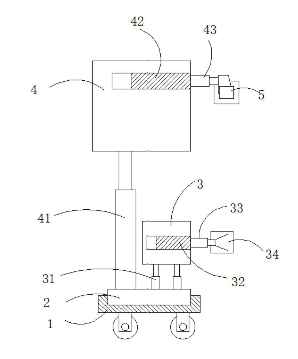
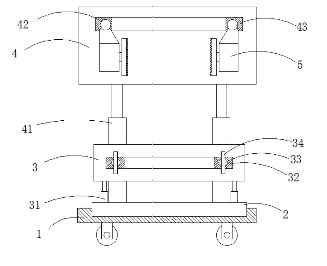
2.根据权利要求1所述的自动化码垛系统,其特征在于,所述码垛机器人包括位于可移动和旋转的旋转台上的称重平台和运输平台,所述称重平台和运输平台上的夹块与旋转台之间分别设置升降、水平横移、水平纵移伺服结构,所述称重平台与称重夹块之间设置称重器,所述运输平台上设置用于运输时避免货物震动的减震机械夹块。
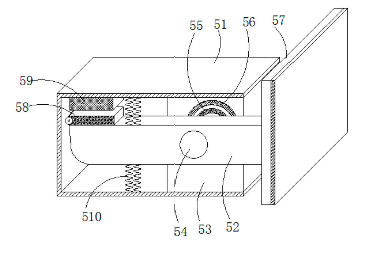
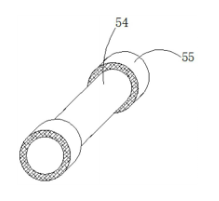
3.根据权利要求2所述的自动化码垛系统,其特征在于,所述减震机械夹块,所述减震机械夹块包括盒体、平衡杆、固定座、转轴、支撑永磁体、支撑电磁块、接触块、平衡永磁体、平衡电磁块和辅助弹簧,其中盒体的一侧开口处设置固定座,所述固定座上通过转轴旋转连接平衡杆,所述转轴的两端外壁设置支撑永磁体,所述固定座上容纳平衡杆两端的凹槽中设置与支撑永磁体对应的支撑电磁块,所述支撑永磁体与支撑电磁块之间不接触设置,所述平衡杆的一端设置用于夹持货物的接触块,所述平衡杆的另一端的上表面设置平衡永磁体,所述盒体的顶部内壁设置与平衡永磁体对应的平衡电磁块,所述平衡永磁体和平衡电磁块之间不接触设置,所述平衡杆位于盒体内部的一端与盒体之间设置辅助弹簧。
4.根据权利要求3所述的自动化码垛系统,其特征在于,所述支撑永磁体与支撑电磁块磁性不同,所述平衡永磁体和平衡电磁块磁性不同。

5.根据权利要求2所述的自动化码垛系统,其特征在于,所述码垛机器人的数量为两个以上,码垛机器人均设置有射频标识,码垛机器人在仓库移动时实时发送射频信号,码垛机人配置为根据接收的其他码垛机器人发送的射频信号计算出与其他码垛机器人的距离,并且所述码垛机器人实时调整运动路线使得与其他码垛机器人之间的距离大于安全距离。
6.根据权利要求5所述的自动化码垛系统,其特征在于,所述码放物品的属性包括码放物品的立体形状和/或体积,所述第一码垛库区、第二码垛库区、第三码垛库区、第四码垛库区的仓位的大小不同。
7.根据权利要求6所述的自动化码垛系统,其特征在于,所述第一码垛库区、第二码垛库区、第三码垛库区、第四码垛库区在所述仓库中的划分规则包括码垛机器人完成码垛操作的路径距离。
8.基于权利要求4所述的自动化码垛系统的某种货物夹持方法,其特征在于,包括以下步骤S1控制器控制称重平台上的称重夹块夹取货物,并通过称重器对货物进行称重,S2称重完后,控制器控制运输平台上的减震机械夹块夹持称重夹块之间的货物,同时调节支撑电磁块和平衡电磁块上的电流,使之与货物的重量相匹配,以保持平衡杆的平衡状态以及所述支撑永磁体与支撑电磁块之间、所述平衡永磁体和平衡电磁块之间不接触的状态。
9.某种采用权利要求5-7任一所述的自动化码垛系统进行自动化码垛的方法,其特征在于,方法包括:将仓库划分若干库区,库区设置若干仓位,动态分配库区,动态调度码垛机器人,执行入库和/或出库操作。
10.某种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求9所述方法。