摘要:
本实用新型涉及一种应用于自动化装配的翻转机械手和机器人。所述翻转机械手包括支撑件,所述支撑件上固定设置有三轴气缸,所述三轴气缸上依次设置有旋转气缸、气爪和手指,所述三轴气缸用于驱动所述旋转气缸、气爪和手指竖直往复运动。所述旋转气缸用于驱动所述气爪和手指180°翻转,所述气爪用于驱动所述手指张开或夹紧。
技术领域:
本实用新型属于机械手领域,更具体地,涉及一种应用于自动化装配的翻转机械手和机器人。
背景技术:
自动化装配领域常常利用机械手代替人来完成装配工作,很多机器设备的组装,要求Z轴方向上的电机要竖直安装并且电机输出轴要在下方,然而平常放置电机时,往往是以电机轴朝上的方式放置。利用机械手取来电机并且送往Z轴上合适的安装位置时,需要完成180°的翻转功能,虽然利用市场上现有的六轴机械手可以实现该功能,但是成本高,控制系统复杂,不太适用于中小型企业。因此开发一种可实现180°翻转且控制系统简单,成本低廉的机械手具有重要的研究意义和经济价值。
发明内容:
本实用新型的目的在于克服现有六轴机械手控制系统复杂、成本高的缺陷和不足,提供一种应用于自动化装配的翻转机械手。本实用新型提供的翻转机械手利用三轴气缸、旋转气缸、气爪和手指的配合作用,可实现机械手的180°翻转,从而完成电机的翻转,结构简单,控制系统简单,成本低廉。
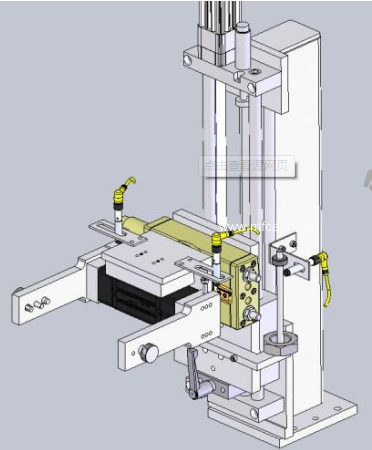
本实用新型的另一目的在于提供一种应用于自动化装配的翻转机器人,为实现上述实用新型的目的,本实用新型采用如下技术方案:一种应用于自动化装配的翻转机械手,包括支撑件,所述支撑件上固定设置有三轴气缸,所述三轴气缸上依次设置有旋转气缸、气爪和手指,所述三轴气缸用于驱动所述旋转气缸、气爪和手指竖直往复运动,所述旋转气缸用于驱动所述气爪和手指180°翻转,所述气爪用于驱动所述手指张开或夹紧。

本实用新型所指的180°翻转是指绕竖直方向,或Z轴翻转180°。三轴气缸可在气压驱动下进行竖直方向的直线往复运动,并带动旋转气缸、气爪和手指进行直线往复运动,旋转气缸可在气压驱动下进行180°的翻转运动,从而带动气爪和手指进行180°的翻转运动,气爪在气压传动下可张开或夹紧,从而带动手指张开或夹紧。即通过三轴气缸、旋转气缸、气爪和手指的配合作用可实现翻转机械手在Z轴,竖直方向,上的伸缩、180°翻转以及夹紧松开的动作。
具体使用方式如下:通气,气爪张开,旋转气缸复位,三轴气缸缸体伸长,气爪到达电机放置点,改变通气方式,气爪夹紧,三轴气缸缸体收缩,带动气爪回移,旋转气缸翻转180°,带动气爪旋转,完成对电机的翻转。
与现有技术相比,本实用新型具有如下有益效果:本实用新型提供的应用于自动化装配的翻转机械手利用三轴气缸、旋转气缸、气爪和手指的配合作用,可实现机械手的180°翻转,从而完成电机的翻转,结构简单,控制系统简单,成本低廉。





























