本发明公开了某种生产线用机械手及生产线用自动化抓取方法,机械手包含两个半体、一组同步机构与一个保持部,同步机构两个半体相对于爪手座体的打开角度始终相对,保持部可通过作用于两个半体的不同壁部实现两个半体相对状态的切换;自动化抓取方法通过导槽与弹性关卡,可使两个半体可在远离治具的位置打开并在靠近治具的位置闭合以实现对待抓取工件的抓取,无需多余的执行元件,可节约成本,且提升抓取效率,且避免了复杂系统中走线或走管的麻烦。
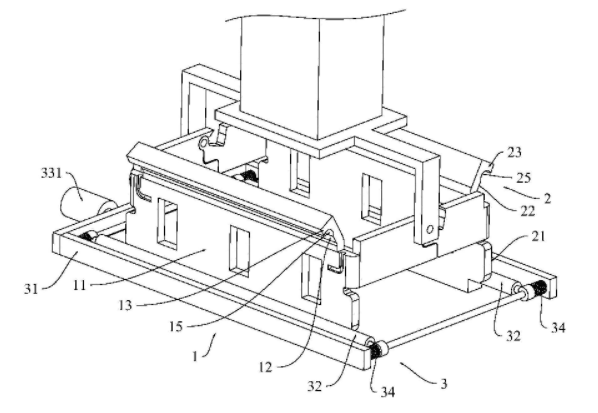
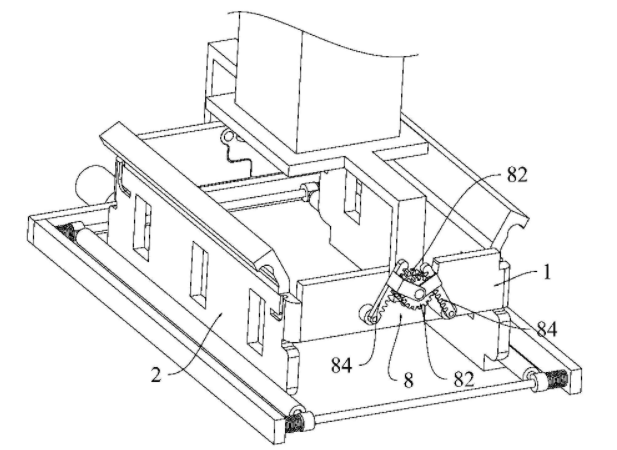
1.某种生产线用机械手,其特征在于,其包括相互铰接的两个半体,分别为第一半体(1)与第二半体(2);两个所述半体可在相对打开状态与相对闭合状态两种状态间切换; 所述第一半体(1)与第二半体(2)均安装在爪手座体上,所述第一半体(1)、所述第二半体(2)与所述爪手座体之间设置有同步机构(8); 所述同步机构(8)包括相对于所述爪手座体固定的机构座体(81),所述机构座体(81)上安装有两个同步齿轮(82),两个所述同步齿轮(82)分别置于所述机构座体(81)的两侧;每个所述同步齿轮(82)均具有副齿轮部(821),所述机构座体(81)上安装有两个分别与两个所述副齿轮部(821)啮合的过渡齿轮(83),所述机构座体(81)上设置有用于容置两个所述过渡齿轮(83)的容置腔,且两个所述过渡齿轮(83)均相对于所述机构座体(81)转动安装;两个所述过渡齿轮(83)在所述机构座体(81)内的部分相互啮合,且两个所述过渡齿轮(83)分别具有从所述机构座体(81)的两侧伸出的伸出部分,且两者的伸出部分分别与两个所述同步机构(8)的副齿轮部(821)啮合;所述第一半体(1)与所述第二半体(2)上均铰接有同步齿条(84),两个所述同步齿条(84)分别与两个所述过渡齿轮(83)啮合; 所述第一半体(1)具备第一功能壁,所述第一功能壁包括第一壁部(11)与第二壁部(12),两个壁部之间的第一夹角为钝角;所述第二半体(2)具备第二功能壁,所述第二功能壁包括第三壁部(21)与第四壁部(22),两个壁部之间的第二夹角为钝角;所述第一夹角与第二夹角相等; 还包括保持单元(3);在所述相对闭合状态下,所述保持单元(3)作用于所述第一壁部(11)与所述第三壁部(21),并使两者相对平行;在所述相对打开状态下,所述保持单元(3)作用于所述第二壁部(12)与所述第四壁部(22),并使两者相对平行; 所述保持单元(3)包括保持架(31),所述保持架(31)上安装有两个相对平行设置且用于作用于两个功能壁的圆辊(32),所述保持架(31)上还安装有牵引部(33)。
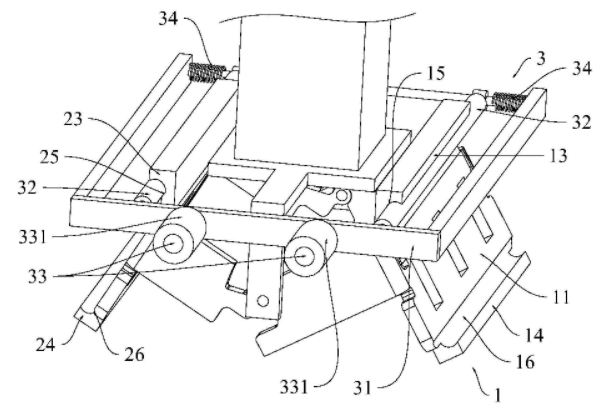
2.根据权利要求1所述的生产线用机械手,其特征在于,所述第一功能壁的两端分别设有第一挡沿(13)与第二挡沿(14);所述第二功能壁的两端分别设有第三挡沿(23)与第四挡沿(24)。
3.根据权利要求2所述的生产线用机械手,其特征在于,所述第一功能壁的两端与所述第一挡沿(13)及第二挡沿(14)的交界处分别设有第一沟槽(15)与第二沟槽(16);所述第二功能壁的两端与所述第三挡沿(23)与第四挡沿(24)的交界处分别设有第三沟槽(25)与第四沟槽(26);两个所述圆辊(32)分别通过两个滑动座(34)安装在所述保持架(31)上;所述保持单元(3)还包括弹性元件(34),所述弹性元件(34)使得两个所述滑动座(34)具有相对靠近运动趋势。
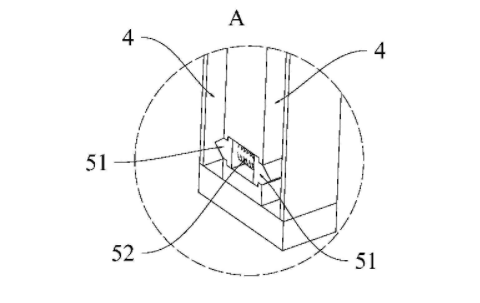
4.某种生产线用自动化抓取方法,其特征在于,其应用于自动化抓取系统,所述自动化抓取系统包括如权利要求3所述的自动化机械手,还包括机械臂(6)、导槽(4)以及用于对被抓取工件进行定位的治具(7),所述自动化机械手安装在所述机械臂(6)的末端;所述导槽(4)的两端分别具备用于作用于所述牵引部(33)的弹性关卡(5); 所述弹性关卡(5)包括阻挡块(51)与弹簧(52);所述阻挡块(51)具有可伸入所述导槽(4)内的部分,所述弹簧(52)置于所述阻挡块(51)与所述导槽(4)之间,并使的阻挡块(51)向所述导槽(4)的内部作进给运动的趋势; 所述自动化抓取方法包括: 步骤1:控制所述机械臂(6)运转,使得所述保持单元(3)的牵引部(33)正对于所述导槽(4)的一端; 步骤2:控制所述机械臂(6)运转,使得所述保持单元(3)从所述导槽(4)的第一端进入所述导槽(4),并沿着所述导槽(4)运动;所述保持单元(3)沿着所述导槽(4)运动过程中,所述保持单元(3)的牵引部(33)首先碰到离第一端近的所述弹性关卡(5)的阻挡块(51)的V形端;所述阻挡块(51)的阻力使得所述保持架(31)停止运动,而两个半体仍随着机械臂(6)的运动而继续运动,如此,两个圆辊(32)脱出第一沟槽(15)与第三沟槽(25),且随着两个半体正向运动,其中一个圆辊(32)到达第一半体(1)的第一壁部(11)与第二壁部(12)的交界处,另一个圆辊(32)到达第二半体(2)的第三壁部(21)与第四壁部(22)的交界处,从此相对位置开始,随着两个半体继续正向运动,两个圆辊(32)分别与第二壁部(12)与第四壁部(22)接触,并使两者相互平行,如此两个半体相对打开;随着两个半体继续正向运动,两个圆辊(32)分别进入第二沟槽(16)与第四沟槽(26)并与第二挡沿(14)与第四挡沿(24)接触;随着两个半体继续正向运动,第二挡沿(14)与第四挡沿(24)对两个圆辊(32)施加作用力,使得牵引部(33)对弹性关卡(5)的压力增加,如此,牵引部(33)挤压阻挡块(51)的V形端,使得V形端离开导槽(4),牵引部(33)得以跨过弹性关卡(5)继续运动,直至第二挡沿(14)与第四挡沿(24)带着保持单元(3)运动使得牵引部(33)再跨过导槽(4)的第二端的阻挡块(51),控制机械臂(6)停止运动;此时,处于相对打开状态的两个半体位于治具(7)上待抓取工件的两侧; 步骤3:控制机械臂(6)运转,使得自动化机械手反向运动,运动过程中,首先,牵引部(33)与导槽(4)的第二端的阻挡块(51)接触,由于阻挡块(51)的阻力,保持架(31)停止运动,而两个半体仍随着机械臂(6)的运动而继续运动,如此,两个圆辊(32)脱出第二沟槽(16)与第四沟槽(26),且随着两个半体反向运动,其中一个圆辊(32)到达第一半体(1)的第一壁部(11)与第二壁部(12)的交界处,另一个圆辊(32)到达第二半体(2)的第三壁部(21)与第四壁部(22)的交界处,从此相对位置开始,随着两个半体继续反向运动,两个圆辊(32)分别与第一壁部(11)与第三壁部(21)接触,并使两者相互平行,如此两个半体相对闭合将治具(7)上的待抓取工件夹持;随着两个半体继续反向运动,两个圆辊(32)分别进入第一沟槽(15)与第三沟槽(25)并与第一挡沿(13)与第三挡沿(23)接触;随着两个半体继续反向运动,第一挡沿(13)与第三挡沿(23)对两个圆辊(32)施加作用力,使得牵引部(33)对弹性关卡(5)的压力增加,如此,牵引部(33)挤压第二端的阻挡块(51)的V形端,使得V形端离开导槽(4),牵引部(33)得以跨过弹性关卡(5)继续运动,直至第一挡沿(13)与第三挡沿(23)带着保持单元(3)运动使得牵引部(33)再跨过导槽(4)的第一端的阻挡块(51)并脱出导槽(4)。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























