发明公开了某种高负载关节型砖坯码垛机器人,属于机械设备技术领域。一种高负载关节型砖坯码垛机器人包括底座、腰部回转机构、平衡缸机构、臂部机构、腕部机构,其特征在于,所述底座整体为法兰状,通过螺栓固定在地面或工作台上,所述腰部回转机构包括腰部驱动装置、腰部轴承座、推力轴承、动力输出轴和转盘,所述平衡缸机构是一种拉杆式单杆活塞缸,平衡缸支架一端通过螺栓铰接在大臂轴承座上,另一端通过螺栓铰接在臂部关节轴上,所述臂部机构包括大臂部分和小臂部分,所述腕部机构包括腕部驱动装置、腕部输出轴、减速器座、上盖和腕部压盖。本发明具有工作载荷大,码垛精度高,结构紧凑,灵活性大,占地面积小,工作空间大的优点。
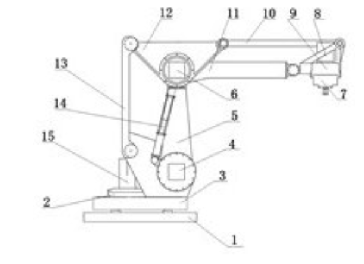
1.某种高负载关节型砖坯码垛机器人包括底座、腰部回转机构、平衡缸机构、臂部机构、腕部机构,其特征在于,所述底座整体为法兰状,通过螺栓固定在地面或工作台上,与腰部轴承座通过均匀分布的螺栓连接固定,所述腰部回转机构包括腰部驱动装置、腰部轴承座、推力轴承、动力输出轴和转盘,所述平衡缸机构是一种拉杆式单杆活塞缸,平衡缸支架一端通过螺栓铰接在大臂轴承座上,另一端通过螺栓铰接在臂部关节轴.上,所述臂部机构包括大臂部分和小臂部分,所述腕部机构包括腕部驱动装置、腕部输出轴、减速器座、上盖和腕部压盖。
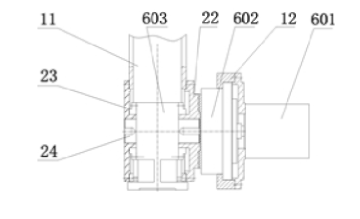
2.根据权利要求1所述的某种高负载关节型砖坯码垛机器人,其特征在于,所述腰部驱动装置包括腰部交流伺服电机和腰部减速器,所述腰部交流伺服电机通过键联接连接腰部减速器,所述腰部减速器采用端面法兰联接形式与动力输出轴连接,动力输出轴通过平键联接带动转盘做回转运动,所述腰部轴承座通过推力轴承为转盘的运动提供支撑,与底座通过均布的螺栓连接。

3.根据权利要求1所述的某种高负载关节型砖坯码垛机器人,其特征在于,所述平衡缸位于支架中间位置,且缸体与活塞杆均分别连接一个带孔滑块,所述大臂轴承座支架由通过活塞杆滑块的四根连杆与缸体滑块通过螺栓固定。
4.根据权利要求1所述的某种高负载关节型砖坯码垛机器人,其特征在于,所述大臂部分包括大臂回转支撑机构、竖拉杆和大臂主臂,所述大臂回转支撑机构包括大臂轴承座、大臂减速器和大臂交流伺服电机,所述大臂交流伺服电机通过键联接连接到大臂减速器,所述大臂减速器与联接压盖固定连接,联接压盖固定安装于大臂主臂上,并通过传动键将动力传递给大臂传动轴,大臂传动轴再通过传动键把驱动力传递给大臂主臂另一侧的大臂压盖,大臂压盖固定安装于大臂主臂上,大臂主臂的上端与小臂回转支撑机构通过两排螺栓固定连接,所述大臂轴承座与腰部转盘通过螺栓连接固定,所述大臂主臂结构采用空心的薄壁矩形框体结构,由低合金高强度结构钢的钢板焊接制成,竖拉杆在工作过程中始终与大臂平行,竖拉杆上端与小臂部分的摇臂左端铰接,下端与平衡杆支架铰接,在整个工作过程中与平衡杠机构起支撑作用。

5.根据权利要求1所述的某种高负载关节型砖坯码垛机器人,其特征在于,所述小臂部分包括小臂回转支撑机构、摇臂.横拉杆和小臂主臂,所述小臂回转支撑机构包括小臂轴承座、小臂减速器和小臂交流伺服电机,所述小臂回转支撑机构下端与大臂主臂上端用螺栓连接,采用空心的薄壁矩形框体结构,横拉杆与小臂主臂平行,其前端与腕部机构的上盖铰接,后端与摇臂右端铰接,整个臂部部分组成腕部姿态调整机构。
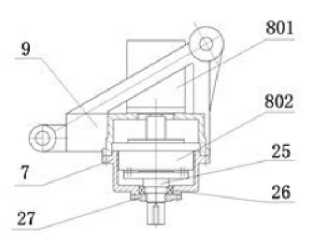
6.根据权利要求1所述的某种高负载关节型砖坯码垛机器人,其特征在于,所述腕部驱动装置是对地垂直安装的一个腕部减速器和腕部交流伺服电动机,所述腕部交流伺服电机与腕部减速器通过传动键联接,通过螺栓固定在上盖上端,上盖具有较强的承载能力,上盖的上端和左端分别与横拉杆右端和小臂主臂的小端铰接,连同摇臂-起构成平行四边形连杆机构,所述减速器座与上盖通过均布的螺栓联接,所述腕部减速器与腕部输出轴采用端面法兰联接形式固定,角接触球轴承与减速器座通孔过盈配合,通过腕部输出轴的轴肩和腕部压盖定位,为腕部输出轴提供支撑,所述腕部压盖通过六个均布螺栓与减速器座联接固定。
7.根据权利要求1所述的某种高负载关节型砖坯码垛机器人,其特征在于,所述腰部驱动装置、大臂回转支承机构、小臂回转支撑机构和腕部驱动装置中所涉及的减速器均为摆线针轮减速机。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























