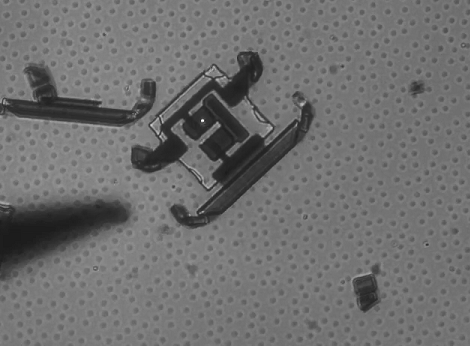
近日,外国最新一期的杂志写到这样一篇报道,康奈尔大学研究人员创造出了首个含半导体元件的行走微型四脚机器人,尺寸小于0.1mm,相当于人头发的宽度都不到,还可以通过激光控制其腿部行走,下面让我们来了解一下吧!
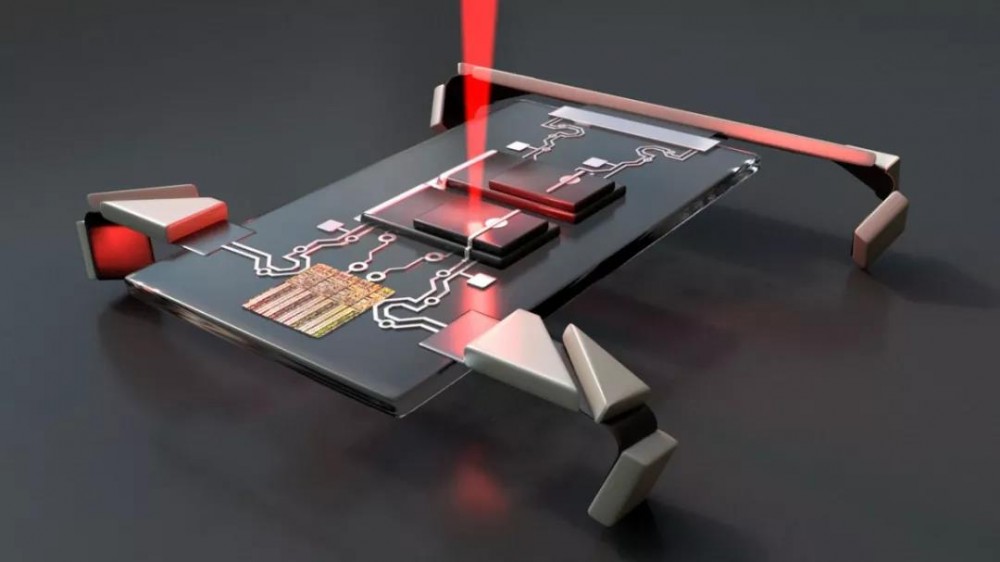
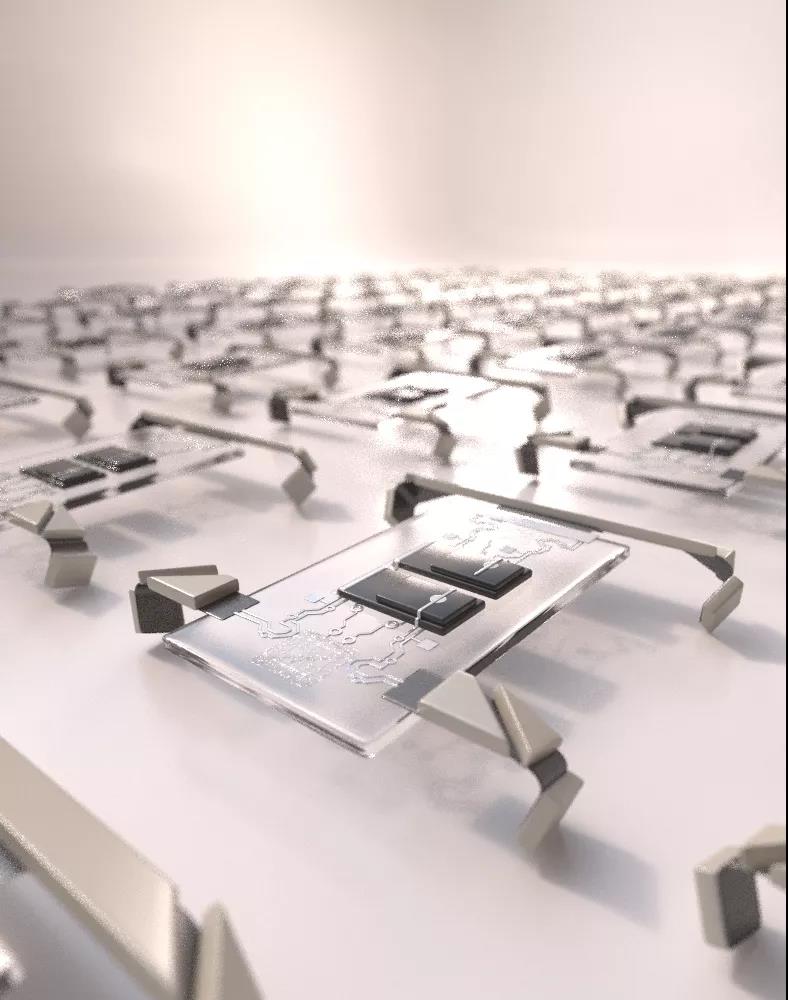
这种微型机器人大约有5微米厚(1微米是一米的百万分之一)、40微米宽、40到70微米长,可由标准光刻工艺制造而成,并能够进行大规模生产,一个4英寸的硅片可同时制造约100万个这种机器人。每个机器人都由一个硅光电板制成的简单电路组成,其基本功能类似于躯干和大脑,还有四个电化学驱动器构成了机器人的腿。
研究人员以不同光伏闪烁激光脉冲来控制这些机器人移动,每一个脉冲可以给一只腿充电,通过在光电板前后切换激光来控制机器人行走。它们在低电压(200毫伏)和低功率(10毫微瓦)条件下就可移动。虽然体形微小但十分结实,在未来,这些微型机器人或许可以穿梭在人体组织和血液中,执行外科医生的操作,缝合血管,探测人类大脑等。
本研究的第一作者、康奈尔大学纳米科学 Kavli研究所Miskin表示,“控制一个微型机器人就如同控制一个缩小版的你,它们可以带我们进入各种各样的微型世界。”通过生产微型化电子器件来制造细胞大小的机器人一直是人们追求的目标。
早在1959年,诺贝尔奖得主 Richard Feynman 就表示:“让外科医生进入身体内部(即制造一个可以通过血管进行手术的微型机器人)将会十分有趣。”这个对于未来医疗的美好愿景凸显了将纳米级微型机器人部署到微观世界的重要性,然而这一想法谈何容易。
首先,在液体中控制微型机器人的移动十分具有挑战性,因为在液体中强大的阻力使得微型机器人无法保持动力,因此该技术一直受到限制,十几年来科学家一直致力于开发在液体中行进的微米级驱动器。庆幸的是,Miskin及其同事采用一些策略来克服制造微型机器人的技术挑战,通过利用太阳能电池开发出了一款微型驱动器,成功克服了这个问题。
微型机器人能够被移液器和注射器安全吸入,并像化学物质一样通过皮下针头注射,由于它们体型微小,因而可以通过最小型号的皮下注射针头,并且在注射后也可维持机械功能,这样一个微型机器人为探索生物内环境带来了可能。
研究人员还将这个微型机器人称为“牵线木偶”,因为操作员可以通过激光照射机器人底盘上的太阳能电池来提供指令。而它主要的缺点也在于,这些机器人必须始终与它们的能力和信息源“拴在一起”。
不过,目前这些微型机器人功能仍有限,它们不能自动行走,移动速度比大多数游泳机器人慢,且不能感知环境,缺乏磁引导微型机器人的控制。尽管如此,这些微型机器人仍然具有巨大潜力,它们能与标准的CMOS处理兼容。研究人员目前正在探索使用更复杂的电子装置和计算方法来改进机器人。
在未来,这种微型机器人不仅能在液体中移动,还可以使用车载传感器和逻辑电路输入更高级的指令,执行更加复杂的操作,这将使我们离 Feynman的设想更进一步。
(文章来源于机器人在限网)





























