本发明涉及某种物流机器人及其抓取方法,其包括底盘,以及设置在所述底盘上的云台面、机械臂、机械爪和视觉检测模块;所述底盘的上部中央位置处设置有所述云台面,所述云台面上设置有所述机械臂,位于所述机械臂的末端设置有所述机械爪,并在所述机械爪的上部设置有所述视觉检测模块。方法包括:扫描二维码信息或经WIFI通信获取搬运任务;根据搬运任务对机器人运动进行定位;对物块进行识别颜色,根据识别结果先后抓取不同颜色的物块;识别货架下方条形码信息,确定物块放置的货架,完成放置。本发明能实现多区域搬运,并能有效提高工作效率与稳定性,拓宽物流机器人的工作场景。
1.某种物流机器人的抓取方法,其特征在于,包括: 步骤S1、扫描搬运任务二维码或经WIFI通信获取搬运任务; 步骤S2、根据搬运任务控制机器人进行目标运动,到达相应目标点; 步骤S3、对物块进行颜色识别,根据识别结果先后抓取不同颜色的物块; 步骤S4、识别货架下方的条形码信息,确定物块放置的货架,完成放置。
2.如权利要求1所述方法,其特征在于,所述步骤S3中,在识别颜色时,首先进行白平衡处理减少光源变化而带来的影响,根据识别物块的位置选取ROI区域;根据所需识别颜色设定的阈值对图像进行二值化处理,判断经二值化处理后的色块大小是否在预先设定的面积阈值内,来判断该色块位置是否为所需抓取物块的位置。
3.如权利要求2所述方法,其特征在于,检测到的色块大小在预先设定目标物体大小阈值范围内时,则判定该颜色色块的位置为所需抓取物块所在的位置,通过判断该色块中心在Openmv视角中的相对位置来判断该物块所处位置。
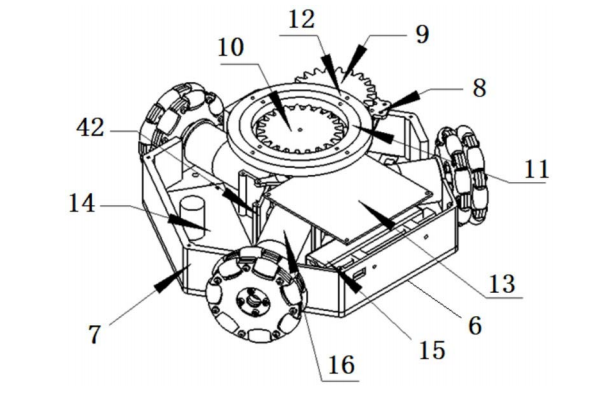
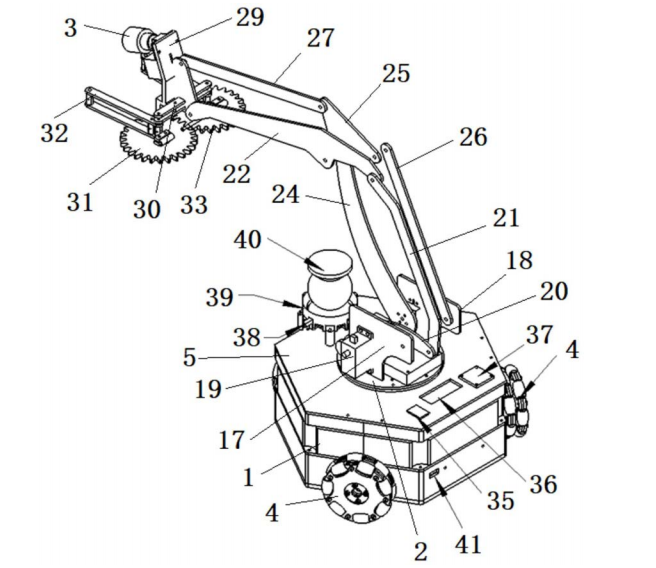
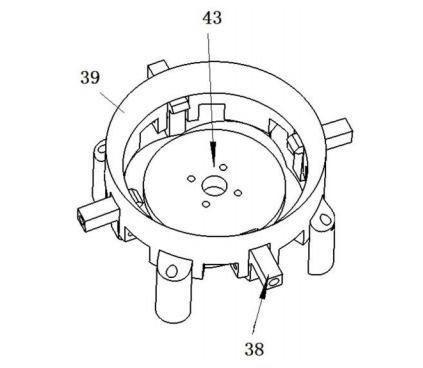
4.某种用于实现如权利要求1至3任一项所述方法的物流机器人,其特征在于,包括底盘,以及设置在所述底盘上的云台面、机械臂、机械爪和视觉检测模块;所述底盘的上部中央位置处设置有所述云台面,所述云台面上设置有所述机械臂,位于所述机械臂的末端设置有所述机械爪,并在所述机械爪的上部设置有所述视觉检测模块; 所述底盘包括上层底板、下层底板、侧板、云台、云台舵机、驱动齿轮、云台齿轮;所述云台由云台内圈和云台外圈构成;所述上层底板中部设置有一通孔,该通孔用于容置所述云台,所述云台面安装在该云台的上表面;所述下层底板的上方设置有所述上层底板,位于所述上层底板和下层底板之间的周缘处设置有支撑用的所述侧板,所述下层底板上设置有所述云台舵机,所述云台舵机的输出端与所述驱动齿轮同轴连接,所述驱动齿轮与一小齿轮啮合,该小齿轮与所述云台齿轮同轴连接,所述云台齿轮设置在所述云台内圈内,并与所述云台内圈紧配合,由所述云台齿轮带动所述云台内圈转动;所述云台内圈与所述云外外圈活动连接,所述云台面与所述云台内圈固定连接。
5.如权利要求4所述物流机器人,其特征在于,所述下层底板上设置有主控板、电机驱动板、电池和车轮电机;所述主控板与所述电机驱动板电连接,所述电机驱动板与各电机电连接,所述电池与所述主控板和各电机连接;所述车轮电机设置为三个,分别与一全向轮连接;在所述车轮电机的两侧还分别设置有支撑保护板,用于保护设置在所述车轮电机尾部的霍尔编码器。
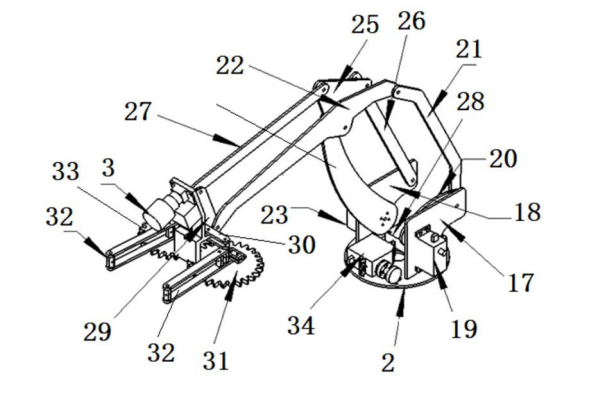
6.如权利要求4所述物流机器人,其特征在于,所述机械臂包括第一驱动臂、第二驱动臂、支撑臂、第一固定板、第二固定板、传动短杆、第一舵机、第一从动臂、第二从动臂、三角连接板和第二舵机,所述第一从动臂的第一端设置有第一连接孔和第二连接孔; 所述第一固定板和第二固定板分别设置在所述云台面的两侧,所述第一固定板的外侧设置有所述第一舵机,所述第一舵机的输出端与设置在所述第一固定板内侧的所述传动短杆一端连接,所述传动短杆的另一端与所述第一驱动臂的第一端连接,所述第一驱动臂的第二端与所述第一从动臂第一端的第一连接孔连接;所述第二固定板的外侧设置有所述第二舵机,所述第二舵机的输出端与设置在所述第二固定板内侧的所述第二驱动臂的第一端连接,所述第二驱动臂的第一端位于所述第二固定板的前部;所述第二驱动臂的第二端与所述三角连接板的顶角连接;所述支撑臂的第一端设置在所述第二固定板的内侧,位于所述第二固定板的后部;所述支撑臂的第二端与所述三角连接板的第一个底角连接,所述三角连接板的第二个底角与所述第二从动臂的第一端连接,且该第二个底角同时与所述第一从动臂的第二连接孔连接;所述第一从动臂的第二端和第二从动臂的第二端都与所述机械爪连接,所述第一从动臂、第二从动臂、三角连接板和机械爪构成平行四连杆机构,通过所述支撑臂使得该平行四连杆机构有一对平行边与地面始终垂直。
7.如权利要求6所述物流机器人,其特征在于,所述云台面上,位于所述第一固定板和第二固定板之间设置有用于控制各舵机转向的舵机控制板。
8.如权利要求6所述物流机器人,其特征在于,所述机械爪包括连接板、连杆、第三舵机、控制连线、主动齿轮、从动齿轮、第一爪头、第二爪头和弹簧;所述连接板的后部上端与所述第二从动臂的第二端连接,后部下端与所述第一从动臂的第二端连接;所述连杆穿设在所述连接板下部,所述连杆采用中空结构,所述主动齿轮通过第一连接轴与所述第一爪头的第一端连接,且该第一连接轴活动设置在所述连杆的第一端;与所述主动齿轮啮合的所述从动齿轮通过第二连接轴与所述第二爪头的第一端连接,且该第二连接轴活动设置在所述连杆的第二端;位于所述第一爪头的第一端和第二爪头的第一端之间设置有所述弹簧;所述主动齿轮上设置有偏心孔,所述控制连线的第一端固定设置在该偏心孔上,所述控制连线的第二端与设置在所述云台面前部的所述第三舵机连接,由所述第三舵机带动所述控制连线拉紧,带动所述主动齿轮和从动齿轮在所述连杆上由外向内转动,使所述第一爪头和第二爪头向内靠近实现所述机械爪的闭合,同时将所述弹簧压缩;所述第三舵机停止动作时,所述第一爪头与所述第二爪头之间通过所述弹簧的弹力分开,实现所述机械爪的张开。
9.如权利要求8所述物流机器人,其特征在于,所述视觉检测模块设置在所述连接板的前部上方。
10.如权利要求4所述物流机器人,其特征在于,所述云台面的前部设置有卡扣、载物台和盘型凸轮;所述载物台和盘型凸轮设置在所述上层底板上,所述载物台的周向间隔设置有四个开口,各所述开口内分别设置有所述卡扣,所述卡扣的底部通过转轴与所述载物台活动连接;所述盘型凸轮位于所述载物台的内侧,且所述盘型凸轮与设置在所述底盘内的凸轮舵机连接,由所述凸轮舵机控制其转动,所述盘型凸轮控制所述卡扣锁紧或放松放置在所述载物台上的物块。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























