本发明涉及视觉检测控制系统、分拣系统及方法、瞄准系统及方法,视觉检测控制系统包括图像采集单元、数据处理单元及运动控制单元,图像采集单元包括高速相机和光源,数据处理单元包括FPGA,高速相机通讯连接FPGA,FPGA采用并行化处理方式,集成有多种用于通讯的外部接口,高速相机采集的原始图像数据传输至FPGA,FPGA提取图像特征并对物体进行快速识别,然后发出相应的脉冲信号对运动控制单元进行控制。本发明的视觉检测控制系统可实现高速数据采集及数据处理,大大提高系统响应控制速度,可提高工作效率,应用范围广;分拣系统可在物品自由落体过程中实现快速分拣,大大提高分拣效率;瞄准系统可实现自动瞄准及跟踪。
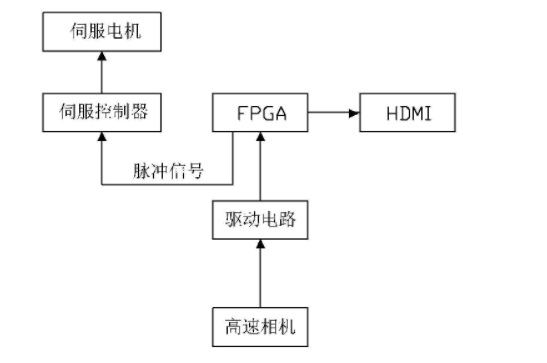
1.视觉检测控制系统,其特征在于,包括有图像采集单元、数据处理单元及运动控制单元,图像采集单元包括高速相机和光源,数据处理单元包括FPGA,高速相机通讯连接FPGA,FPGA通过输出脉冲信号连接控制运动控制单元,FPGA采用并行化处理方式,并集成有多种用于通讯的外部接口,高速相机采集的原始图像数据传输至FPGA,FPGA用于提取图像特征并基于图像特征对物体进行快速识别,并发出相应的脉冲信号对运动控制单元进行控制。
2.如权利要求1所述的视觉检测控制系统,其特征在于,还包括有CPU,CPU采用实时操作系统,高速相机通过CPU与FPGA连接,CPU与FPGA之间采用基于PCIe的DMA通信。

3.如权利要求1所述的视觉检测控制系统,其特征在于,所述高速相机通过驱动电路通讯连接FPGA。
4.如权利要求1所述的视觉检测控制系统,其特征在于,所述运动控制单元包括伺服电机及伺服控制器,FPGA输出脉冲信号至伺服控制器,伺服控制器连接控制伺服电机。
5.如权利要求1所述的视觉检测控制系统,其特征在于,所述外部接口包括串口、网口、I/O口、USB接口、HDMI接口中的多种。
6.分拣系统,其特征在于,包括如权利要求1至5任一所述的视觉检测控制系统,还包括有自由落体式分拣通道,分拣通道出口处安装有分拣控制机构,高速相机及光源设置于分拣通道上并位于自动分拣机构上方,分拣通道出口分隔为多个分拣口,每个分拣口分别对应承接设置有分拣筐,所述分拣控制机构包括有用于控制各分拣口打开或关闭的分拣挡板、连接分拣挡板并可带动分拣挡板转动的所述运动控制单元,物品进入分拣通道并沿分拣通道做自由落体运动,高速相机采集分拣通道中的图像数据传输至FPGA,FPGA提取图像特征并基于图像特征对物体进行快速识别,并输出脉冲信号控制运动控制单元带动分拣挡板转动将对应分拣口打开,以实现物品分拣。
7.一种基于权利要求6所述的分拣系统的分拣方法,其特征在于,包括以下步骤: 步骤1,FPGA采用LabVIEW图形化编程方式,根据所需识别物品特征进行物品识别算法的初始化设定,并设定物品分拣规则; 步骤2,系统启动后,物品进入分拣通道并沿分拣通道做自由落体运动,高速相机在物品到达高速相机位置前采集分拣通道中的图像数据传输至FPGA; 步骤3,FPGA提取图像特征并通过物品识别算法对物品进行快速识别,并在物品到达分拣口位置前输出脉冲信号控制运动控制单元带动分拣挡板转动将对应分拣口打开,以实现物品分拣。
8.如权利要求7所述的分拣方法,其特征在于,所述物品识别算法包括以下步骤中的一种或多种,且多个步骤通过FPGA以多级流水线方式并行处理: 步骤1.1,颜色识别算法:根据物品标准色对应R、G、B三种颜色的分量值,在色卡上划定阈值范围,基于提取的图像特征对比R、G、B各分量的值进行颜色识别,若在色卡划定的阈值范围内,则判定为与物品颜色相符,否则,判定为与物品颜色不符; 步骤1.2,大小识别算法:根据物品占总图像的像素点个数设定阈值范围,基于提取的图像特征,通过对比符合色卡上划定的颜色阈值范围的像素点个数是否在设定阈值范围,判断大小是否符合物品特征,若在阈值范围内则判定为物品,否则,判定为非物品; 步骤1.3,形状识别算法:基于数学形态学选取可有效表征物品形状的几何特征参量并设定对应的阈值范围,对图像进行二值化,提取图像中的目标轮廓,计算目标轮廓的几何特征参量与设定阈值范围进行对比,符合设定的阈值范围,则判定为与物品形状相符,否则,判定为与物品形状不符。
9.瞄准系统,其特征在于:包括如权利要求1至5任一所述的视觉检测控制系统,还包括射出装置及安装于射出装置上的瞄准具,所述高速相机设置于瞄准具前端,所述运动控制单元连接控制射出装置运动,高速相机采集图像数据传输至FPGA,FPGA提取图像特征并基于图像特征对目标物体进行快速识别,识别到目标物体出现在图像中时,根据目标物体所处位置输出脉冲信号控制运动控制单元带动射出装置运动瞄准目标物体并自动射出。
10.一种基于权利要求9所述的瞄准系统的瞄准方法,其特征在于,包括以下步骤: 步骤1,FPGA采用LabVIEW图形化编程方式,根据所需识别目标物体的特征进行目标物体识别算法的初始化设定,目标物体识别算法包括颜色识别、大小识别、形状识别算法中的一种或多种,各特征识别算法通过FPGA以多级流水线方式并行处理; 步骤2,系统启动后,高速相机采集图像数据传输至FPGA; 步骤3,FPGA提取图像特征并通过目标物体识别算法对目标物体进行快速识别,当识别到目标物体出现在图像中时,计算目标物体所处坐标,并根据目标物体所处坐标输出脉冲信号控制运动控制单元带动射出装置运动瞄准目标物体并自动射出。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























