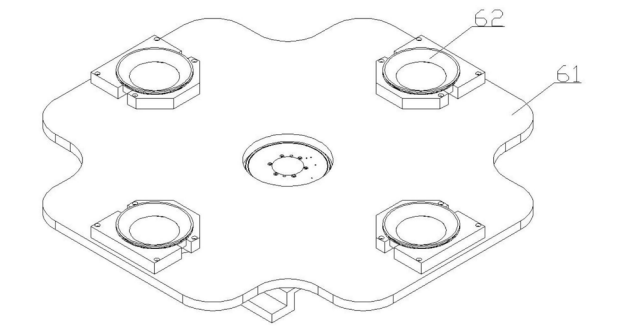
本发明涉及适用于瓷盘的某种外观检测线,包括机台、瓷盘放置工装、第一瓷盘移载机构、第一视觉检测系统、第二视觉检测系统、瓷盘运载机构以及第二瓷盘移载机构。瓷盘放置工装、第一瓷盘移载机构沿着由左至右方向依序而置,且均布置于瓷盘运载机构的左侧。第一视觉检测系统布置于机台的台面正下方,且可与第一瓷盘移载机构相对位。第二视觉检测系统布置于瓷盘运载机构的正后方。第二瓷盘移载机构布置于瓷盘运载机构的右侧。瓷盘运载机构包括有物料盘、置放治具以及间歇式分度驱动单元。沿物料盘周向划分出有多个工位分区,以用来固定各置放治具。间歇分度驱动单元由机台进行支撑,以驱动物料盘绕其中心轴线进行间歇分度周向旋转运动。
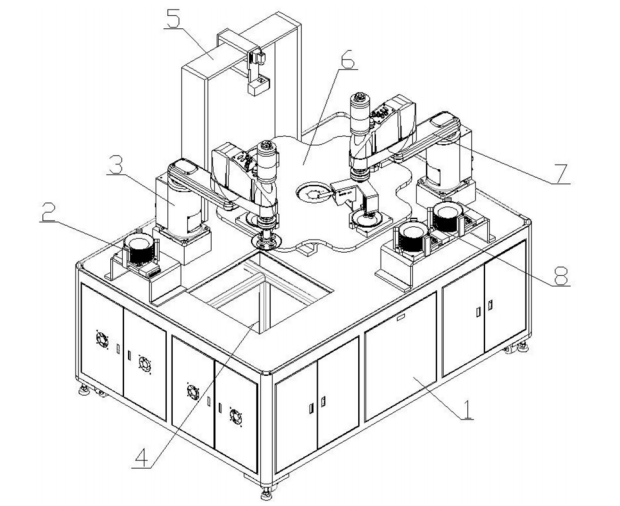
1.某种适用于瓷盘的外观检测线,其特征在于,包括机台、瓷盘放置工装、第一瓷盘移载机构、第一视觉检测系统、第二视觉检测系统、瓷盘运载机构以及第二瓷盘移载机构;所述瓷盘放置工装、所述第一瓷盘移载机构、所述第一视觉检测系统、所述第二视觉检测系统、所述瓷盘运载机构、所述第二瓷盘移载机构均由所述机台进行支撑;所述瓷盘放置工装、所述第一瓷盘移载机构沿着由左至右方向依序而置,且均布置于所述瓷盘运载机构的左侧;所述第一视觉检测系统布置于所述机台的台面正下方,且可与所述第一瓷盘移载机构相对位;在所述机台的台面上开设有与所述第一视觉检测系统相正对位的透视窗口;所述第二视觉检测系统布置于所述瓷盘运载机构的正后方;所述第二瓷盘移载机构布置于所述瓷盘运载机构的右侧;所述瓷盘运载机构包括有物料盘、置放治具以及间歇式分度驱动单元;所述物料盘平行地布置于所述机台的正上方,且沿其周向划分出有多个工位分区;所述置放治具的数量设置为多个,且一一对应地固定于所述工位分区上,且跟随所述物料盘进行同步旋转运动;所述间歇分度驱动单元由所述机台进行支撑,以驱动所述物料盘绕其中心轴线进行间歇分度周向旋转运动。
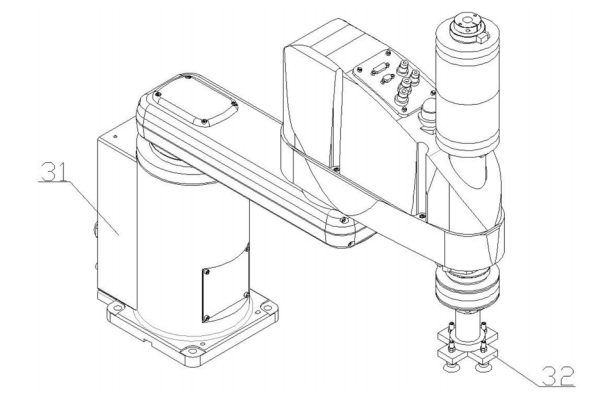
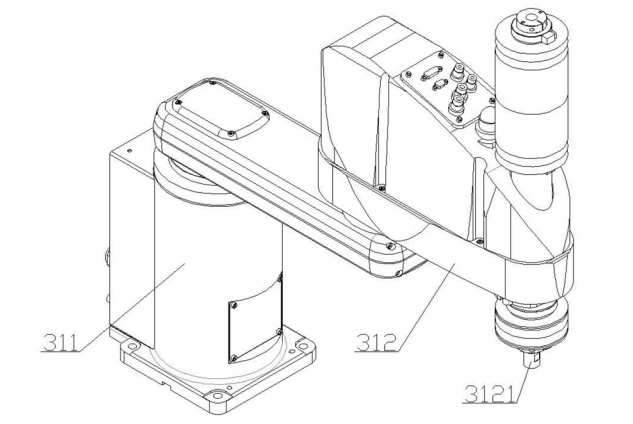
2.根据权利要求1所述适用于某种瓷盘的外观检测线,其特征在于,所述第一瓷盘移载机构包括第一搬运机器人以及第一真空吸附单元;所述第一搬运机器人包括有第一机器人本体和第一机械手臂;所述第一真空吸附单元用来吸附瓷盘,且与所述第一机械手臂可拆卸地进行固定。
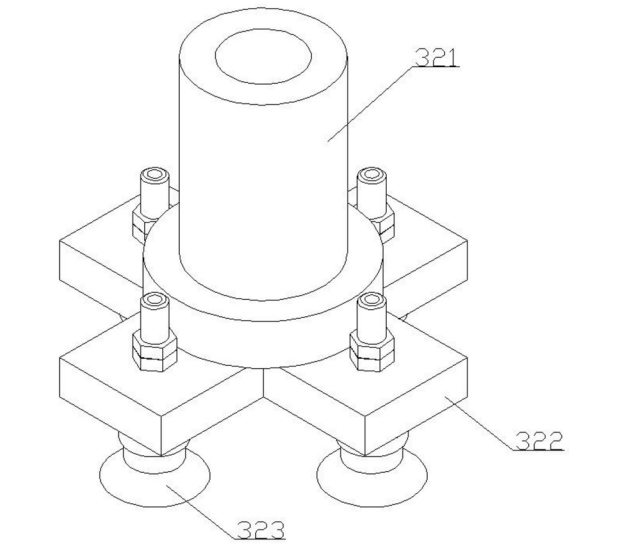
3.根据权利要求2所述适用于瓷盘的某种外观检测线,其特征在于,所述第一真空吸附单元包括有连接套筒、安装基板以及第一真空吸嘴组件;在所述第一机械手臂的自由端设置有安装轴;所述连接套筒套设、固定于所述安装轴上;所述安装基板贴靠于所述连接套筒的底端面上,且与所述连接套筒相固定;所述第一真空吸嘴组件的数量至少为3个,均穿插于所述安装基板上,且围绕所述连接套筒的中心轴线进行周向均布。
4.根据权利要求1所述适用于瓷盘的某种外观检测线,其特征在于,所述第二瓷盘移载机构包括有第二搬运机器人、安装板、第二真空吸附单元以及激光镭射测距仪;所述第二搬运机器人包括有第二机器人本体和第二机械手臂;所述安装板与所述第二机械手臂相固定;所述第二真空吸附单元、所述激光镭射测距仪均可拆卸地固定于所述安装板上,且相互间隔设定距离。
5.根据权利要求4所述某种适用于瓷盘的外观检测线,其特征在于,所述第二真空吸附单元包括有固定基板、第二真空吸嘴组件以及直线驱动元件;所述固定基板可拆卸地固定于所述安装板上;所述直线驱动元件可拆卸地固定于所述固定基板上,以驱动所述第二真空吸嘴组件进行线性位移运动。
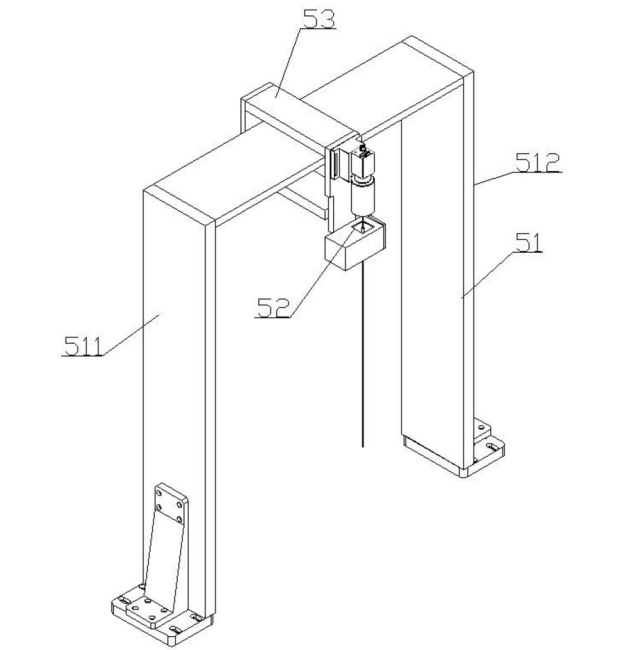
6.根据权利要求1所述某种适用于瓷盘的外观检测线,其特征在于,所述第二视觉检测系统包括有支撑架和图像抓取组件;所述支撑架固定于所述机台上;所述图像抓取组件由所述支撑架进行支撑,且布置于所述物料盘的正上方;当所述间歇式分度驱动单元发生动作时,所述图像抓取组件依序与各所述工位分区保持对位。
7.根据权利要求6所述某种适用于瓷盘的外观检测线,其特征在于,所述支撑架包括有第一立柱、第二立柱以及横梁;所述第一立柱、所述第二立柱直接与所述机台可拆卸地进行固定;所述横梁由所述第一立柱、所述第二立柱同时进行支撑;所述第二视觉检测系统还包括有滑移架;所述图像抓取组件与所述滑移架可拆卸地固定为一体;所述滑移架套设于所述横梁上,且可沿着所述横梁长度延伸方向以及宽度延伸方向自由地进行位置调整。
8.根据权利要求1-7中任一项所述某种适用于瓷盘的外观检测线,其特征在于,还包括有不良品放置工装;所述不良品放置工装亦由所述机台进行支撑,且布置于所述瓷盘运载机构的正前方。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























