摘要:
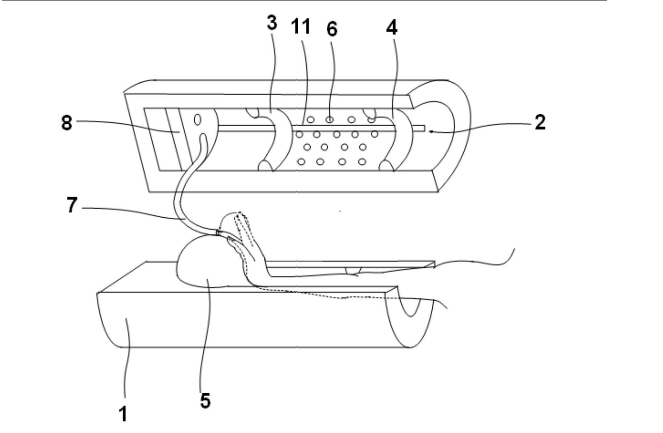
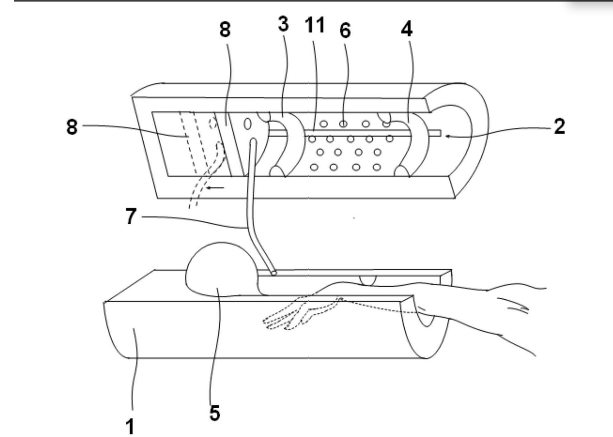
本实用新型公开了一种自动化石膏固定机器人,壳体的侧壁上设置有一个可容纳患者四肢进入的水平腔体,述腔体内壁上设置有至少一个与腔体轴线方向平行的滑轨,滑轨上安装有与之匹配的两圈可沿腔体轴线方向上滑动的充气气囊,在腔体的口部端设置有一让患者套在手臂上的内衬发放组件,腔体的另一端为功能位恢复面,功能位恢复面上方设置有牵引手指的牵引装置,壳体内壁上设置有若干石膏出料孔,壳体的内壁和外壁之间设置有盛装液态石膏的储液箱,储液箱的进液口设置于壳体的外壁上,储液箱的出液口与壳体内壁上石膏出料孔连通。
技术领域:
本实用新型涉及一种医疗机器人,具体为一种自动化石膏固定机器人,属于医疗设备技术领域。
背景技术:
随着社会经济的不断发展和人们生活节奏的不断加快,人们在生活中越来越容易受伤,外伤造成的四肢扭伤甚至是骨折越来越多,目前医生在临床治疗中,对于四肢末端的轻微骨折、脱位及关节、韧带损伤,如常见的桡骨远端骨折、踝部骨折、踝关节扭伤等,使用手法复位结合石膏固定术是最常用的保守治疗方法。
目前临床上均由医生人工进行石膏固定术,但是可能存在以下问题:
1.医生经验存在差异,进行石膏固定时可能会导致一些并发症,例如石膏过紧会影响患者血液循环,严重者可导致远端缺血坏死,石膏过松则起不到固定的作用。
2.人工打石膏费时费力,需要大量的人力成本。因此设计一款可实现自动化石膏固定等操作的机器人装置,具有一定的临床应用前景。
实用新型内容:
本实用新型的目的是为了提供一种自动化石膏固定机器人,以解决现有技术的上述技术问题。本实用新型的目的是通过以下技术方案来实现的充气气囊和牵引装置均包含有使之在滑轨上滑行驱动电机,并与控制电路电性连接。壳体由腔体的轴线所在平面分成两个壳体单元,两个壳体单元间的一侧通过铰链连接,通过锁扣锁紧,两个壳体单元之间还设置有气缸组件控制打开和关闭。当为手臂时,功能位恢复面为一类似于球面的曲面,用于对手臂骨折的功能位复位。当为腿脚时功能位恢复面为一竖直板,用于对小腿骨折的功能位复位。
内衬发放组件包括若干个内衬袋和摆放内衬袋并将内衬袋口撑开的支撑架,支撑架具有对称的两个滑竿,滑竿的下部相互平行为摆放部,上部弯曲形成椭圆圆形为撑开部,摆放部依次叠放内衬袋,内衬袋的口部分别套接在支撑架的两侧滑竿上,内衬袋上移,内衬袋的口部被撑开部撑开,从而让手臂进入,撑开部设置于腔体的口部。内衬袋相互分离卷放在第二气囊与腔体口部之间,使用时将最上面的一各内衬袋上移至撑开部即可,内衬袋包括半指手套部和手臂部。
本实用新型中,所述的“水平”仅仅为描述清楚技术方案而设定的一个状态,在实际过程中,可以为不同的角度。通过本实用新型技术方案设计而成的石膏固定机器人,可通过机器进行自动打石膏,减少了经验的差异,解放了医务人员的压力,大幅提高了石膏固定的效率。





























