本发明公开了一种协作型机器人关节模块和协作机器人,解决了现有机器人关节模块可伸缩范围有限、灵活性不够等问题,具有能够拾取多方位垃圾、拾取范围大、关节运动灵活的效果。其技术方案为:包括机械手臂,所述机械手臂安装于伸缩关节模块的一端,伸缩关节模块的另一端连接第一旋转模块;所述第一旋转模块通过直角关节模块安装于第二旋转模块上方,所述第二旋转模块底部固定移动型支座;其中,所述机械手臂包括能够多方向弯折的本体框架,所述本体框架固定有用于测量其运动过程中变形的应变传感器。
技术领域
[0001] 本发明涉及机器人领域,尤其涉及一种协作型机器人关节模块和协作机器人。
背景技术
[0002] 随着机器人的不断发展,机器人的种类不断增加,传统机器人已经在各行各业得到广泛应用,工业机器人主要用于码垛、冲压、焊接、激光切割、喷涂、分拣、视觉应用,无论何种形状的机器人,都是以机器人关节为关键部位。同时,由于环保事业的发展,人们的环保意识也越来越强,海上垃圾拾取需要耗费大量人力、财力,也不能彻底拾取所有垃圾。而协作型机器人解决了海上垃圾拾取这一难题,不仅减少了人力的浪费,还节约了时间,能够更加精准的捡拾垃圾。 [0003] 协作型机器人关节模块主要应用于海上垃圾捡拾场景,公开结合了可伸缩关节模块、智能机械臂、转动关节模块、可移动底座,可实现抓取不同范围内的垃圾,有利于环保事业的发展。发明人发现,现有协作型机器人关节模块无法实现远近不同范围内的拾取,拾取范围比较单调,且移动需借助其他工具,需要耗费大量人力,发展并不完善。
发明内容
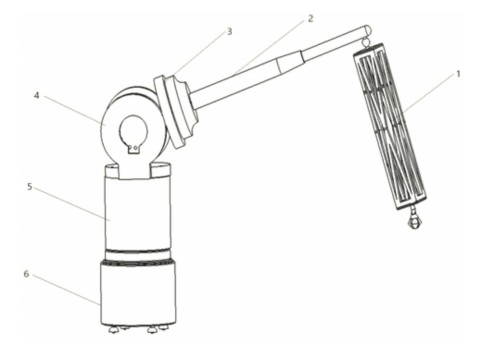
[0004] 为了克服现有技术的不足,本发明提供了一种协作型机器人关节模块和协作机器人,其具有能够拾取多方位垃圾、拾取范围大、关节运动灵活的效果。 [0005] 本发明采用下述技术方案: [0006] 一种协作型机器人关节模块,包括机械手臂,所述机械手臂安装于伸缩关节模块的一端,伸缩关节模块的另一端连接第一旋转模块;所述第一旋转模块通过直角关节模块安装于第二旋转模块上方,所述第二旋转模块底部固定移动型支座; [0007] 其中,所述机械手臂包括能够多方向弯折的本体框架,所述本体框架固定有用于 测量其运动过程中变形的应变传感器。 [0008] 进一步的,所述本体框架安装若干转动轴,本体框架能够以转动轴为中心旋转;所述本体框架通过控制系统来实现转动。 [0009] 进一步的,所述转动轴安装于本体框架的中间位置,使得本体框架在转动时不会相互影响。 [0010] 进一步的,所述本体框架的侧面设有交叉基本梁,交叉基本梁安装若干销钉,交叉 基本梁能够以销钉为中心旋转。 [0011] 进一步的,所述本体框架通过控制系统来实现转动。 [0012] 进一步的,所述伸缩关节模块包括缸体与缸体滑动连接的内筒,所述内筒连接活 塞,通过活塞在缸体内部形成空气压力推动内筒移动。 [0013] 进一步的,所述内筒置于缸体内部的一端具有卡接凸缘,缸体内壁开设有卡接槽。 [0014] 进一步的,所述移动型支座包括套设在一起的上导向座和下导向座,所述下导向座底部安装多个伸缩车轮。 [0015] 进一步的,所述伸缩车轮包括伸缩杆,所述伸缩杆的端部安装车轮。 [0016] 进一步的,所述伸缩杆采用金属带材或塑料片材卷制而成。 [0017] 进一步的,所述直角关节模块包括与第一旋转模块相连的第一保护罩、与第二旋 转模块相连的第二保护罩,所述第一保护罩与第二保护罩垂直。 [0018] 一种协作机器人,包括所述的协作型机器人关节模块。 [0019] 与现有技术相比,本发明的有益效果是: [0020] (1)本发明机械手臂自身能够弯折,配合第一旋转关节模块、第二旋转关节模块、 伸缩关节模块能够实现多方位垃圾的拾取、拾取范围大; [0021] (2)本发明设置伸缩车轮,使机器人关节能够灵活移动,以满足对拾取高度和范围的要求。





























