本发明提供了某种缺陷检测方法和装置,其中,该方法包括:采集训练样本图像;对训练样本图像进行灰度化和去均值化处理,以获取目标样本集,并对目标样本集进行标注以将目标样本集划分为良好样本集和缺陷样本集;根据良好样本集和缺陷样本集采用对角白化变换的方式构造空域滤波器;采用空域滤波器对良好样本集和缺陷样本集进行处理,以获取相应的目标特征向量;根据目标特征向量对SVM算法进行训练,以获取SVM分类模型;根据SVM分类模型对待检测产品进行缺陷检测。根据本发明的缺陷检测方法,不仅能够准确地进行缺陷检测,而且方案实施简单,并且所需的样本较少,即使在复杂工业环境下也能够保证缺陷检测的准确性。

1.某种缺陷检测方法,其特征在于,包括以下步骤: 采集训练样本图像; 对所述训练样本图像进行灰度化和去均值化处理,以获取目标样本集,并对所述目标样本集进行标注以将所述目标样本集划分为良好样本集和缺陷样本集; 根据所述良好样本集和所述缺陷样本集采用对角白化变换的方式构造空域滤波器; 采用所述空域滤波器对所述良好样本集和所述缺陷样本集进行处理,以获取相应的目标特征向量; 根据所述目标特征向量对SVM算法进行训练,以获取SVM分类模型; 根据所述SVM分类模型对待检测产品进行缺陷检测。
2.根据权利要求1所述的缺陷检测方法,其特征在于,根据所述良好样本集和所述缺陷样本集采用对角白化变换的方式构造空域滤波器,包括: 对所述良好样本集和所述缺陷样本集分别进行归一化处理,以获取第一矩阵和第二矩阵; 计算所述第一矩阵的第一协方差矩阵,并计算所述第二矩阵的第二协方差矩阵; 对所述第一协方差矩阵和所述第二协方差矩阵进行求和运算以获取第三矩阵; 根据所述第三矩阵进行白化变换,以获取第四矩阵; 根据所述第四矩阵分别对所述第一协方差矩阵和所述第二协方差矩阵进行处理,以获取第五矩阵和第六矩阵; 对所述第五矩阵和所述第六矩阵进行同时对角化变换,以获取第一特征向量; 根据所述第一特征向量和所述第四矩阵计算第一投影矩阵,并通过所述第一投影矩阵构建所述空域滤波器。

3.根据权利要求2所述的缺陷检测方法,其特征在于,采用所述空域滤波器对所述良好样本集和所述缺陷样本集进行处理,以获取相应的所述目标特征向量,包括: 采用空域滤波器对所述良好样本集和所述缺陷样本集进行滤波,以获取相应的数据矩阵; 根据所述数据矩阵获取所述目标特征向量。
4.根据权利要求1所述的缺陷检测方法,其特征在于,根据所述良好样本集和所述缺陷样本集采用对角白化变换的方式构造空域滤波器,包括: 采用离散小波变换的方式分别对所述良好样本集和所述缺陷样本集进行N层小波分解,其中,N为正整数; 将所述良好样本集进行N层小波分解的小波系数按照分解的顺序组成第一特征矩阵,并将所述缺陷样本集进行N层小波分解的小波系数按照分解的顺序组成第二特征矩阵; 计算所述第一特征矩阵的第三协方差矩阵,并计算所述第二特征矩阵的第四协方差矩阵; 对所述第三协方差矩阵和所述第四协方差矩阵进行求和运算以获取第七矩阵; 根据所述第七矩阵进行白化变换,以获取第八矩阵; 根据所述第八矩阵分别对所述第三协方差矩阵和所述第四协方差矩阵进行处理,以获取第九矩阵和第十矩阵; 对所述第九矩阵和所述第十矩阵进行同时对角化变换,以获取第二特征向量; 根据所述第二特征向量和所述第八矩阵计算第二投影矩阵,并通过所述第二投影矩阵构建所述空域滤波器。
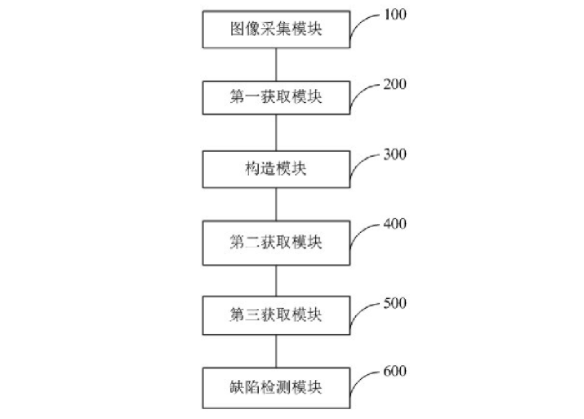
5.某种缺陷检测装置,其特征在于,包括以下步骤: 图像采集模块,所述图像采集模块用于采集训练样本图像; 第一获取模块,所述第一获取模块用于对所述训练样本图像进行灰度化和去均值化处理,以获取目标样本集,并对所述目标样本集进行标注以将所述目标样本集划分为良好样本集和缺陷样本集; 构造模块,所述构造模块用于根据所述良好样本集和所述缺陷样本集采用对角白化变换的方式构造空域滤波器; 第二获取模块,所述第二获取模块用于采用所述空域滤波器对所述良好样本集和所述缺陷样本集进行处理,以获取相应的目标特征向量; 第三获取模块,所述第三获取模块用于根据所述目标特征向量对SVM算法进行训练,以获取SVM分类模型; 缺陷检测模块,所述缺陷检测模块用于根据所述SVM分类模型对待检测产品进行缺陷检测。
6.某种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时,实现根据权利要求1-4中任一项所述的缺陷检测方法。
7.某种非临时性计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现根据权利要求1-4中任一项所述的缺陷检测方法。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























