本发明公开了基于机器视觉的载玻片缺陷检测方法,涉及视觉检测领域,该方法包括:设置检测流道,每个流道中均放一个载玻片;待载玻片进入视觉检测区域,设在载玻片上下两侧的线光源分别曝光,用载玻片上方的相机采集曝光后载玻片的图像;将相机采集第一光线发生装置曝光下的图像用于图像分割;选取流道中的任一图像,获得每个载玻片在图像中的坐标,截取其他流道中的载玻片;将分割后的图像判别不同类型的缺陷;定位待检测区域,进行图像处理。本发明通过线阵相机和线光源的搭配,抓取载玻片同一时刻不同光源不同曝光时间下的多张图片;针对每种缺陷在不同图片上的特性,有选择性的选取图片进行处理,分析缺陷,提高了次品检出率。
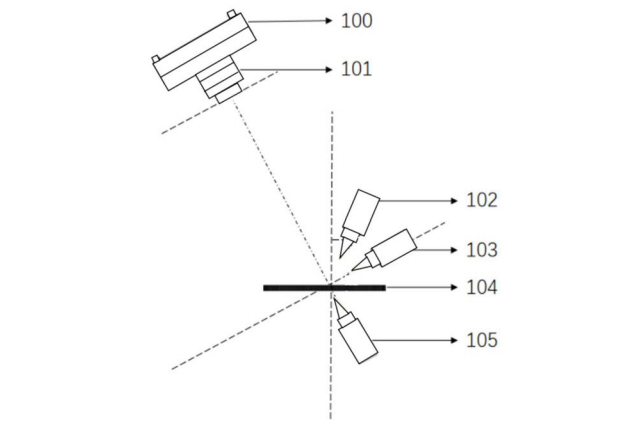
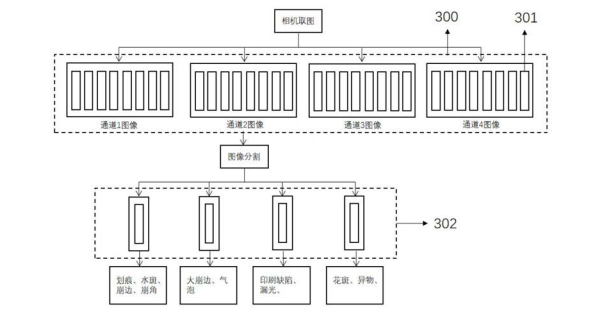
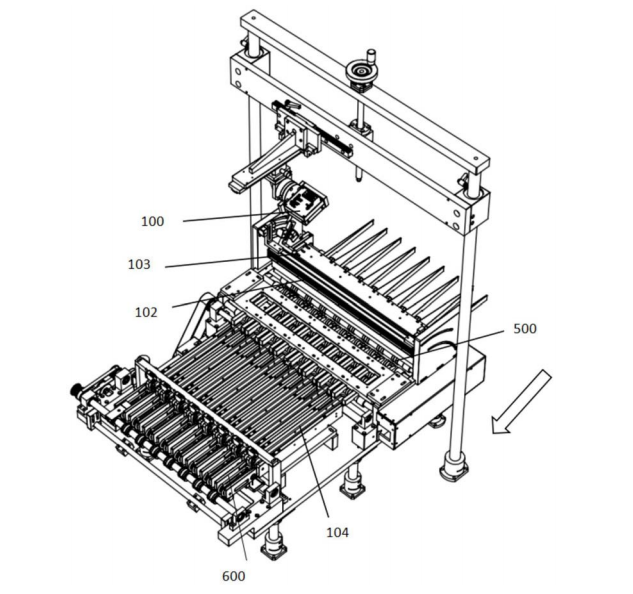
1.某种基于机器视觉的载玻片缺陷检测方法,其特征在于,包括: 步骤S1:设置一检测载玻片缺陷的检测流道,取载玻片分别放入每个检测流道中; 步骤S2:检测流道的前段设有视觉检测区域,待载玻片进入视觉检测区域,设置在载玻片表面上方的第一光线发生装置和第二光线发生装置分别曝光一次,将设置在载玻片表面下方的第三光线发生装置曝光两次,利用设置在载玻片上方的图像接收装置采集曝光后的流道上载玻片的图像数据; 步骤S3:将图像接收装置采集到的第二光线发生装置曝光下的图像用于分割第一光线发生装置和第三光线发生装置曝光下的图像; 步骤S4:选取检测流道中的任一流道图像,利用选取的流道中的载玻片的最小外接矩形的位置信息获得选取的流道中的载玻片在当前流道图像中的坐标,获取位置后,将该流道图像采用阈值分割法分割出未选取的检测流道中放置的载玻片的坐标信息; 步骤S5:通过不同的光源效果将分割后的每个载玻片的图像用于判别不同类型的缺陷;通过第二通道的图像分割出载玻片的坐标进行定位待检测区域,并进行图像处理。
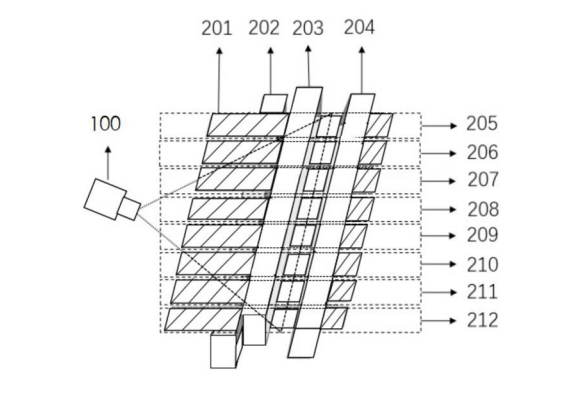
2.根据权利要求1所述的基于机器视觉的载玻片缺陷检测方法,其特征在于,步骤S1中每个检测流道中放置的若干个载玻片两两之间至少间隔35mm。
3.根据权利要求1所述的基于机器视觉的载玻片缺陷检测方法,其特征在于,所述步骤S2中的第一光线发生装置的光线出射端的延长线与所述载玻片上表面的锐角夹角范围为10°-20°。
4.根据权利要求1所述的基于机器视觉的载玻片缺陷检测方法,其特征在于,所述步骤S2中的第一光线发生装置的光线出射端到载玻片上表面的工作距离为60mm-100mm。
5.根据权利要求1所述的基于机器视觉的载玻片缺陷检测方法,其特征在于,所述步骤S2中的第二光线发生装置的光线出射端的延长线与所述载玻片上表面的锐角夹角范围为30°-40°。
6.根据权利要求1所述的基于机器视觉的载玻片缺陷检测方法,其特征在于,所述步骤S2中的第二光线发生装置的光线出射端到载玻片上表面的工作距离为30mm-60mm。
7.根据权利要求1所述的基于机器视觉的载玻片缺陷检测方法,其特征在于,所述步骤S2中的第三光线发生装置的光线出射端的延长线与所述载玻片下表面的锐角夹角范围为5°-25°。
8.根据权利要求1所述的基于机器视觉的载玻片缺陷检测方法,其特征在于,所述步骤S2中的第三光线发生装置的光线出射端到载玻片下表面的工作距离为30mm-50mm。
9.根据权利要求1所述的基于机器视觉的载玻片缺陷检测方法,其特征在于,所述步骤S2中的图像接收装置为线阵相机,所述线阵相机的倾斜角度为5°-25°,所述线阵相机的光线出射端到载玻片上表面的工作距离为396mm-536mm。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























