本发明公开了具有视觉检测的装卸机器人及应用该机器人的开方机,包括装卸机器人1和视觉检测组件2,所述装卸机器人1用于开方机的上料和下料,用于所述装卸机器人1夹持硅棒上料前进行校核的所述视觉检测组件2安装于装卸机器人1外侧,本发明通在装卸机械手附近增设视觉检测组件,从而使得装卸机器手在夹持硅棒上料时,能够实现每根硅棒都进行一次精度校核,与现有的方棒检测不合格时发现夹爪精度有偏差的方式相比,精准更高,并能长期稳定的保证上料精度不变,而且基本不受夹持件磨损的影响。
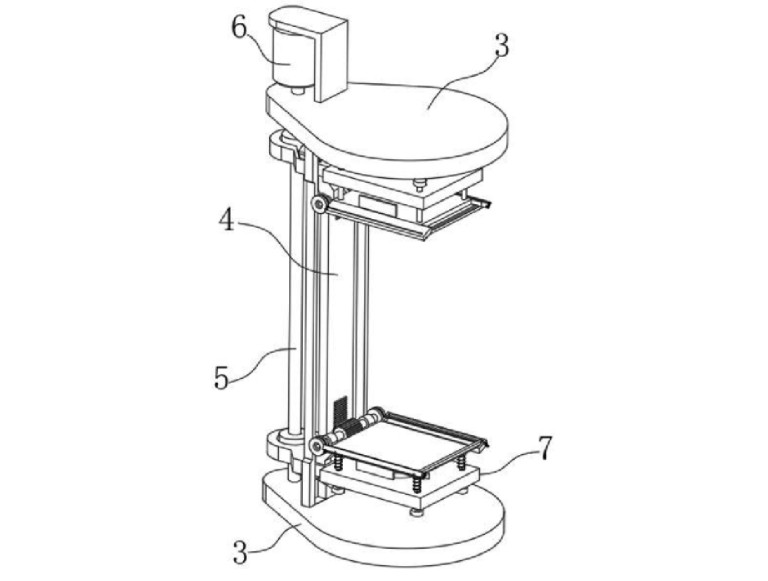
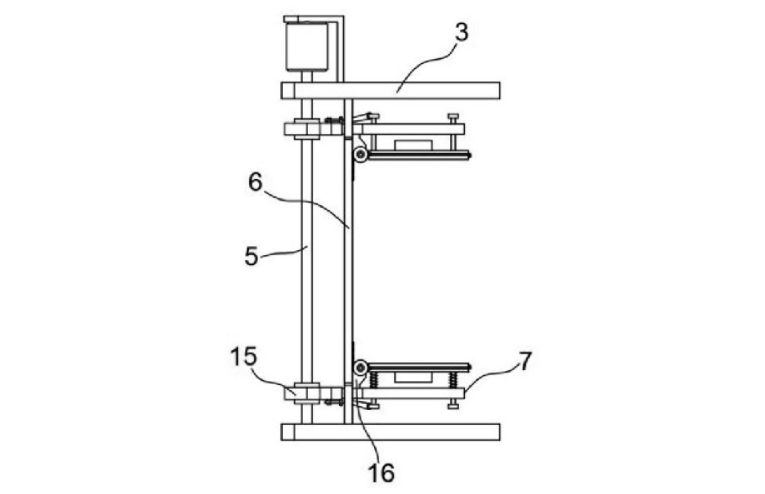
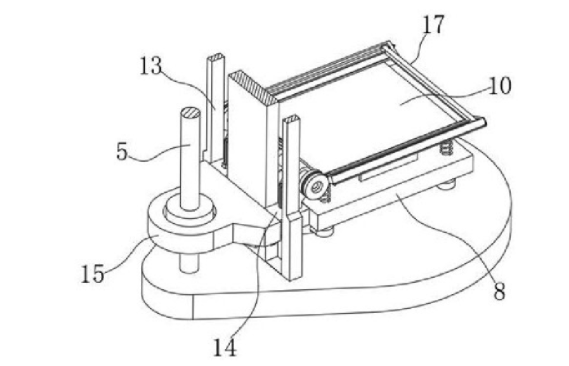
1.具有视觉检测的装卸机器人,其特征在于,包括:装卸机器人(1) ,所述装卸机器人(1)用于开方机的上料和下料:视觉检测组件(2),用于所述装卸机器人(1)夹持硅棒上料前进行校核的所述视觉检测组件(2)安装于装卸机器人(1)外侧:所述视觉检测组件(2)包括两个外框板(3),两个所述外框板(3)之间固定有支撑板(4),且两个外框板(3)之间转动安装有双向螺纹杆(5),位于上方的所述外框板(3)顶部固定有驱动电机(6) ,且驱动电机(6)输出端通过联轴器与双向螺纹杆(5)顶部固定,所述双向螺纹杆(5)两端外侧均安装有用于硅棒拍摄的拍摄机构(7); 所述拍摄机构(7)包括两个安装板(8),两个所述安装板(8)内安装有摄像机,且安装板(8)外侧呈矩形形状滑动插接有多个连接杆(9),多个所述连接杆(9)顶部固定有接触板(10),且多个连接杆(9)底部固定有限位块(11),所述连接杆(9)外侧套有与接触板(10)和安装板(8)相抵的挤压弹簧(12),所述支撑板(4)内开有限位口(13),所述安装板(8)外侧固定有与限位口(13)滑动连接的连接板(14),所述双向螺纹杆(5)外侧螺纹套接有移动板(15) ,且移动板(15)外侧与连接板(14)固定,两个所述连接板(14)表面固定有支撑座(16),且两个支撑座(16)上安装有清洁件(17):所述清洁件(17)包括转动插接在两个支撑板(4)上的连接轴(18),两个所述连接轴(18)外侧固定有调节轮(19),且连接轴(18)中间外侧固定有调节齿轮(20),所述支撑板(4)顶部和底部外侧均固定有多个与调节齿轮(20)相互啮合的齿块(21),所述接触板(10)两端均固定有清洁框(22) ,且清洁框(22)内固定有轨道杆(23) ,所述接触板(10)外侧设有清洁板(24),且清洁板(24)两端伸入两个清洁框(22)内,并与轨道杆(23)滑动连接,所述清洁板(24)外侧固定有调节绳(25),且调节绳(25)一端滑动贯穿清洁框(22)侧壁,并与调节轮(19)外侧固定,所述清洁框(22)底部外侧固定有弹性绳(26),且清洁框(22)顶端外侧固定有转向件(27) ,所述弹性绳(26)一端绕在转向件(27)外侧,另- -端滑动贯穿清洁框(22) ,并与清洁板(24)外侧固定。
2.根据权利要求1所述的具有视觉检测的装卸机器人,其特征在于:所述转向件(27)包括固定在清洁框(22)外端外侧的转向板(28),所述转向板(28)内转动安装有两个转向柱(29) ,且弹性绳(26)套在两个转向柱(29)外侧。
3.根据权利要求2所述的具有视觉检测的装卸机器人,其特征在于:所述调节轮(19)外侧开有收纳槽(30) ,且调节绳(25)固定在收纳槽(30)内。
4.根据权利要求3所述的具有视觉检测的装卸机器人,其特征在于:所述移动板(15)包括与双向螺纹杆(5)螺纹套接的移动轮(31)和套在移动轮(31)外侧的移动套(32) ,所述移动套(32)内开有安装槽(33),且安装槽(33)内设有调节板(34),所述调节板34)尾端外侧固定有两个连接柱(35),并通过连接柱(35)固定有两个移动条(36),两个所述移动条(36)尾端和靠近两个移动条(36)的限位块(11)上均开有安装口(37),且移动条(36)和限位块(11)之间设有调节条(38),调节条(38)两端分别套在移动条(36)和限位块(11)上的安装口(37)内,所述移动轮(31)外侧开有连接槽(39),且连接槽(39)内开有多个限位槽(40),所述调节板(34)外端与连接槽(39)滑动连接,且调节板(34)外端固定有与限位槽(40)相适配的限位板(41)。
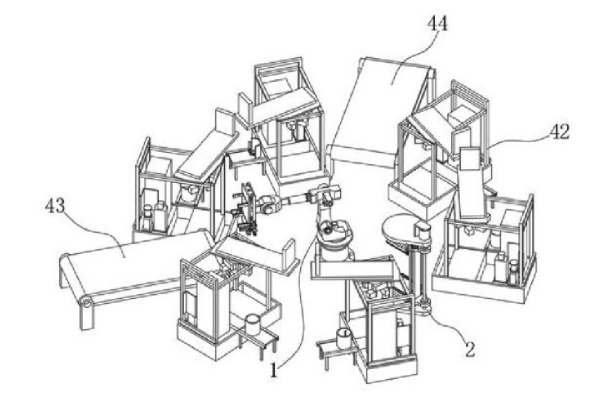
5.根据权利要求4所述的具有视觉检测的装卸机器人相配合应用的开方机,其特征在于,包括:以装卸机器人(1)为圆心围绕在装卸机器人(1)外侧的多个立式开方机(42) ,多个所述立式开方机(42)之间还设有一个上料工位(43)和一个下料工位(44)。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























