本说明书一个或多个实施例提供某种超大视野分布计算视觉检测方法及检测系统。所述检测方法包括:产品承载装置将待检测产品移动至图像采集装置的图像采集位置;图像采集装置对所述待检测产品进行点阵轨迹的高速拍摄,获得所述待检测产品的多张有序的待检测图像并发送给图像检测装置;其中,每张所述待检测图像包括所述待检测产品的至少部分图像;所述图像检测装置基于所述待检测图像进行缺陷检测,基于每张所述待检测图像获得所述待检测产品的部分缺陷检测结果,并基于全部的所述部分缺陷检测结果生成所述待检测产品的完整缺陷检测结果并发送给上位机;所述上位机基于所述完整缺陷检测结果进行展示。本实施例所述方法及系统可以实现晶圆的检测。
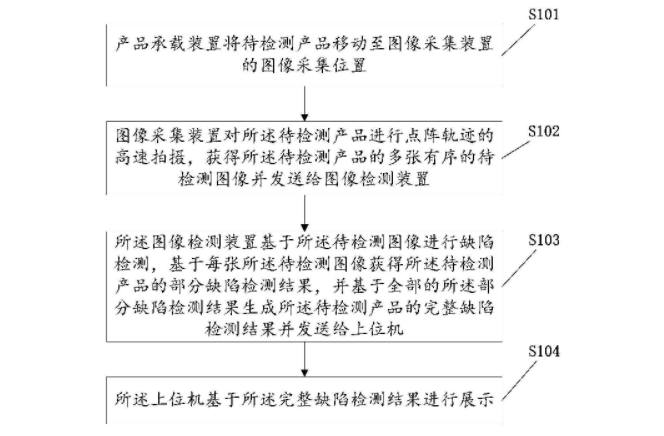
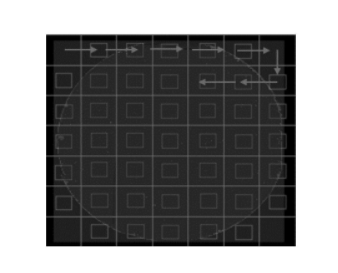
1.某种超大视野分布计算视觉检测方法,其特征在于,包括: 产品承载装置将待检测产品移动至图像采集装置的图像采集位置; 图像采集装置对所述待检测产品进行点阵轨迹的高速拍摄,获得所述待检测产品的多张有序的待检测图像并发送给图像检测装置;其中,每张所述待检测图像包括所述待检测产品的至少部分图像; 所述图像检测装置基于所述待检测图像进行缺陷检测,基于每张所述待检测图像获得所述待检测产品的部分缺陷检测结果,并基于全部的所述部分缺陷检测结果生成所述待检测产品的完整缺陷检测结果并发送给上位机; 所述上位机基于所述完整缺陷检测结果进行展示。
2.根据权利要求1所述的方法,其特征在于,所述将待检测产品移动至图像采集装置的图像采集位置之前,还包括: 获取所述待检测产品的产品ID作为所述待检测图像的标记。
3.根据权利要求1所述的方法,其特征在于,所述图像采集装置对所述待检测产品进行点阵轨迹的高速拍摄之前,还包括: 所述上位机控制所述产品承载装置进行角度纠偏和位置矫正,以使所述待检测产品的中心与所述图像采集装置的视野中心重合。
4.根据权利要求3所述的方法,其特征在于,所述控制所述产品移动装置进行角度纠偏和位置矫正,包括: 基于所述图像采集装置的视野与所述待检测产品中目标检测单元的位置计算第一偏移量; 基于所述待检测产品中目标检测单元的位置、所述待检测产品的尺寸与所述第一偏移量计算第二偏移量; 基于所述待检测产品的尺寸、所述产品承载装置的尺寸、所述待检测产品在所述产品承载装置上的位置与所述第二偏移量计算第三偏移量; 基于所述产品承载装置的标准移动轨迹及所述第三偏移量,计算所述产品承载装置的实际移动轨迹,并控制所述产品承载装置根据所述实际移动轨迹移动至所述图像采集位置。
5.根据权利要求4所述的方法,其特征在于,所述待检测产品中包括阵列分布的多个目标检测单元;所述基于所述图像采集装置的视野与所述待检测产品中检测目标的坐标计算第一偏移量,包括: 获取所述待检测产品中的多个目标检测单元; 将多个所述目标检测单元的中心点拟合成一条直线; 计算该直线与基准图像中的基准直线之间的角度差值,获得所述第一偏移量。
6.根据权利要求5所述的方法,其特征在于,还包括: 对所述待检测产品中的每个目标检测单元进行编号和行列划分,获得每个所述目标检测单元的位置。

7.根据权利要求4所述的方法,其特征在于,所述基于全部的所述部分缺陷检测结果生成所述待检测产品的完整缺陷检测结果,包括: 基于所述第三偏移量将多个所述部分缺陷检测结果投影到虚拟图像中并标记,以获得所述完整缺陷检测结果。
8.根据权利要求1所述的方法,其特征在于,所述图像检测装置基于所述待检测图像进行缺陷检测,基于每张所述待检测图像获得所述待检测产品的部分缺陷检测结果,包括: 对所述待检测图像中的目标检测单元进行轮廓提取,并根据预先设置的缺陷规则确定缺陷分类,获得所述缺陷结果检测数据。
9.根据权利要求1所述的方法,其特征在于,所述图像采集装置对所述待检测产品进行点阵轨迹的高速拍摄,还包括: 获取不同光源照射条件下的所述待检测图像。
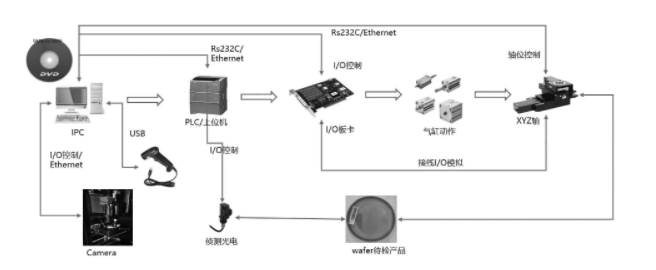
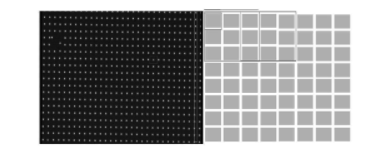
10.一种超大视野分布计算视觉检测系统,其特征在于,用于实现如权利要求1-9任一项所述的超大视野分布计算视觉检测方法,包括产品承载装置、图像采集装置、图像处理装置以及上位机;其中, 所述产品承载装置,被配置为:将待检测产品移动至图像采集装置的图像采集位置; 所述图像采集装置,被配置为:对所述待检测产品进行点阵轨迹的高速拍摄,获得所述待检测产品的多张有序的待检测图像并发送给图像检测装置;其中,每张所述待检测图像包括所述待检测产品的至少部分图像; 所述图像处理装置,被配置为:基于所述待检测图像进行缺陷检测,基于每张所述待检测图像获得所述待检测产品的部分缺陷检测结果,并基于全部的所述部分缺陷检测结果生成所述待检测产品的完整缺陷检测结果并发送给上位机; 所述上位机,被配置为:基于所述完整缺陷检测结果进行展示。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























