微型机器人可以让医生无需进行高度侵入性的手术就可以进入人体内的特定区域,从而在医学领域带来新一轮的创新。除此之外,这些微型机器人还可以用来携带药物、基因或其他物质到身体内的特定部位,为治疗不同的疾病开辟了新的可能性。
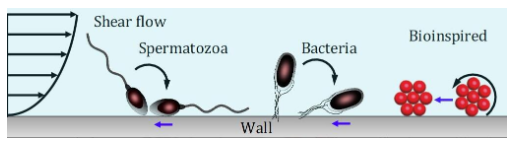
苏黎世ETH和赫尔姆霍兹研究所Erlangen–Nürnberg可再生能源研究所的研究人员最近开发了微型纳米机器人,其灵感来自生物微型游泳者(例如细菌或精子)。这些小型机器人发表在《自然机器智能》上的一篇论文中,它们具有上游运动的能力,这本质上意味着它们可以自主地向与流体(如血液)流动相反的方向移动。这使得它们特别有希望介入人体内部。
“我们相信,在我们的多学科研究中讨论的想法可以改变医学的许多方面,使任务,如有针对性和精确的药物或基因的交付,以及促进非侵入性手术。”丹尼尔艾哈迈德说道。
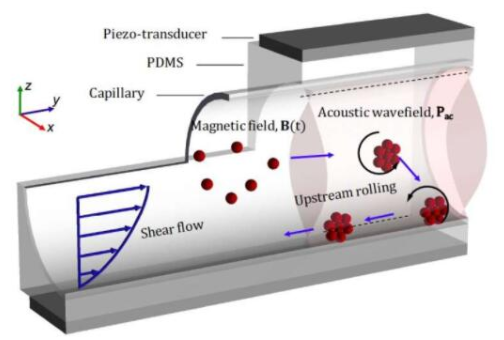
艾哈迈德和他的同事开发的仿生和无线微/纳米机器人系统利用墙壁的无滑移边界条件向上游移动,对外部触发的声场和磁场做出响应。通过逆流向上游游动,机器人可以将小的药物分子输送到身体内部特别难以到达的部位。
在仿生系统中,由于旋转磁场的偶极-偶极相互作用,注入毛细血管的超顺磁性粒子自组装成旋转的微流体。由于存在声压节点(标记为黑色虚线),微温器被边缘化,朝向墙壁。
外场感应机器人是一个很有吸引力的概念,因为它们不需要车载电源或复杂的运动部件,这意味着它们可以缩小到纳米级的分辨率,艾哈迈德说此外,声场和磁场对人体都是安全的,都是非侵入性的,可以深入人体,在临床环境中也很发达。
通过将声场和磁场结合起来,研究人员设计的机器人系统可以帮助克服在其他基于单驱动技术的人工微型游泳者身上观察到的一些问题。此外,由于微型/纳米机器人对外界施加的磁场作出响应,因此不需要车载电源或高度复杂和昂贵的组件。
艾哈迈德解释说:“通常情况下,注射的微小药物会跟随血管系统的血流,而对循环系统几乎没有控制。然而,最近的研究结果表明,许多自然产生的微小颗粒,如细菌和精子,通过利用壁的非滑动边界条件,表现出对流动的推动作用。上游运动成为可能,因为墙的速度最小。”
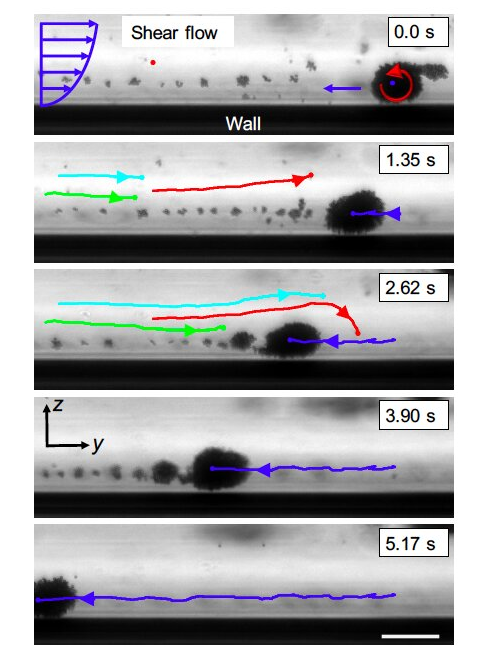
图像序列显示了在声场和磁场的联合作用下,一个微小的温热毛细管沿着毛细血管壁滚动的流变性。反向流动的流线由青色、绿色和红色轨迹表示。
迄今为止,微型或纳米机器人在医学中的应用受到限制,特别是在血管系统(即血液和淋巴流经全身的血管)中。其中一个原因是,在血管系统中工作的机器人应该很容易以非侵入性的方式进行控制,并且应该能够朝着血液流动的相反方向移动,这两个特征到目前为止被证明是相当难以实现的。
艾哈迈德和他的同事们开发的新机器人系统具有这两个特性,因为它能够实现上游运动,并且使用外部施加的声磁场进行控制。在未来,这项最新的研究将为实施靶向手术或通过血管系统将物质输送到体内特定部位开辟新的令人兴奋的可能性。
艾哈迈德说:“大鼠、小鼠和斑马鱼等小动物模型的血流速度在几毫米-1之间。我们现在计划将我们的群微机器人系统与适当的成像模式结合起来,在小动物体内可视化和
导航机器人。逆血流推进的能力为肿瘤血管系统靶向治疗的应用提供了令人兴奋的机会。”
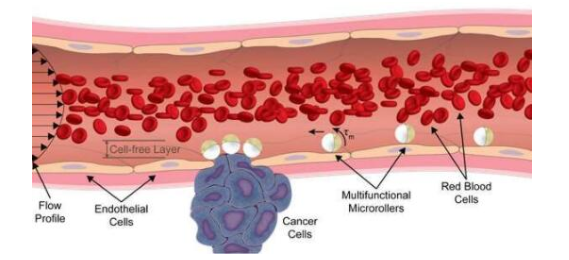
类似白细胞的微型机器人 斯图加特马克斯·普朗克智能系统研究所(MPI-IS)的一组科学家发明了一种微型机器人,它类似于一个白血球在循环系统中移动。它具有白细胞的形状、大小和移动能力,可能会彻底改变疾病的微创治疗。
在实验室环境中模拟一条血管,研究小组成功地在这种动态密集的环境中用磁力引导微辊。球形给药载体经受住了模拟的血液流动,使靶向给药的发展更进一步:在人体内部,没有比循环系统更好的进入所有组织和器官的途径。它横跨每一个细胞,提供了一个理想的路线导航。
研究小组的灵感来自免疫系统的工作组白细胞,因为白细胞是血流中唯一的运动细胞。在他们巡逻到病原体侵入的地方时,他们沿着血管壁滚动,当他们到达一个有问题的地方时,就会穿透血管。其运动的关键主要是由于血管壁的流速大大降低。
利用同样的现象,科学家们开发了一种微型机器人,由于它的磁性,在生理高速血流条件下,它们可以在血管内主动推进和导航。“我们的愿景是创造下一代的微创靶向药物载体,这种载体可以到达身体内更深的组织,比以前更难到达的路径。”MPI-IS物理情报部主任、该出版物的最后一位作者Metin Sitti说。他进一步阐述说,传统的治疗方法在体内存在非特异性药物分布,可能会在非靶器官和组织中造成严重的副作用。
每个微辊直径略低于8微米,由玻璃微粒制成。一面覆盖着一层薄薄的镍和金膜,另一面覆盖着抗癌药物分子和能够识别癌细胞的特定生物分子。利用磁场,我们的微型机器人可以在模拟的血管中向上游导航,这对于强大的血液流动和密集的细胞环境是一个挑战。目前的微型机器人都无法抵挡这股气流。此外,我们的机器人可以自主识别感兴趣的细胞,如癌细胞。它们之所以能做到这一点,是因为它们的表面有一层细胞特异性抗体。他们可以在移动过程中释放药物分子。他是物理情报部门的博士后研究员,也是该出版物的联合主要作者。
在实验室环境中,这种微型滚筒的速度可以达到每秒600微米,大约每秒76个身体长度,代表了这种尺寸下最快的磁性微型机器人。然而,在现实场景中执行此动作之前,需要解决几个挑战。事实上,它们还远没有在人体内得到检验。在实验室里,研究小组能够用显微镜给机器人成像,并用电磁线圈引导它们。
“然而,目前临床上的成像方式分辨率还不足以成像人体内的单个微型机器人。此外,考虑到微型机器人(约10微米)与靶组织(数千微米)之间的尺寸差异,单台微型机器人运输的治疗货物是不够的。因此,在一个群体中对大量的微型机器人进行控制操作是产生足够效果的必要条件。但我们还远远没有做到这一点,这只是个开始。”Ugur Bozuyuk说,他是同一个系的博士生,也是这项研究的共同负责人。
在过去的二十年里,由于在微机械的制造技术、所用材料、驱动和成像方面的许多飞跃,研究领域得到了加速。然而,目前人体内的微型机器人大多局限于浅表组织(例如眼睛内)、相对容易进入的位置(例如胃肠道)和停滞或低速流体环境。要到达身体内部更深的位置,可能没有办法绕过循环系统,尽管条件非常恶劣。科学家们希望,他们开发的生物启发策略将有助于创造一个新的场所,在高速血流条件下,在循环系统中控制微型机器人的导航。这将有可能为微型机器人的靶向和局部治疗提供铺平道路。
来源:贤集网