现在,机器人 可以像工厂装配工一样进行工作,人形机器人员工已经非常普遍,他们可以精准模仿人类的动作。工业机器人在我们看来,工作起来并不费力,但它们的工作只是一个简单的循环。指令发送到附件,电机被激活。但是系统控制器如何知道指令已经送达?答案就是,指令通过传感器 网络反馈到系统控制器。机器人技术 中有六种有用的感测:倾斜,旋转,加速度,冲击,振动和接近。倾斜对于确定机械臂 的位置很有用。倾斜提出了一个有趣的挑战,因为可以通过多种方式进行检测。
如图1所示,自动机械蜘蛛腿的运动是通过使用复杂的逆运动学方程来确定的,该方程通过将控制信号发送到电机来确定附件的正确运动。对于这种复杂的运动,每个附件的当前位置的反馈对于将现有位置与所需位置进行比较至关重要。该ADXL345 3轴13位数字加速度从 Analog Devices公司(ADI)用于测量在三维倾斜检测应用重力的静态加速度。当使用加速度计进行倾斜感应时,设备设置为最低分辨率。ADXL345支持±2 g,±4 g,±8 g和±16 g。选择最低的分辨率±2 g设置是因为地球的重力仅为±1 g,因此在±2g分辨率下的重力感应使用12位,是加速度计13位范围的一半。
对于二维倾斜感应应用,可以使用低g 2轴加速度计,例如 ADI ADIS16003±1.7 g 2轴加速度计。2轴加速度计的方向必须使X轴和Y轴平行于地球表面。换句话说,与地球的重力成直角。这使加速度计可用作支持俯仰和侧倾检测的2轴倾斜传感器。由于ADIS16003支持低1.7 g的加速度,所以当加速度计垂直于重力时,输出的变化非常敏感,每倾斜度为0.0175 g。加速度计的输出信号被转换为代表加速度在±1 g之间变化的数字,从而可以按照公式1表示来计算度数的倾斜度:
公式1 :使用2轴加速度计进行倾斜感测的俯仰和横滚计算
对于以上公式,A X是沿X轴的加速度,A Y是沿Y轴的加速度。重要的是要注意,在测量倾斜角度时,误差仅为±1 g,而诸如机械臂撞击物体或到达其行程终点之类的事件可能会导致信号远大于±1 g。
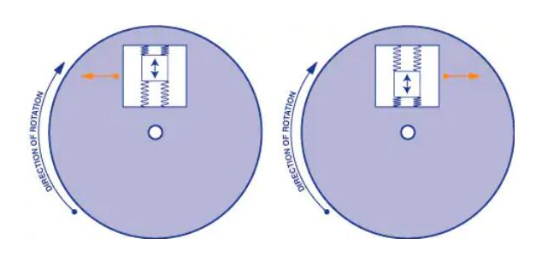
旋转工具和手臂 机械臂可以出于各种目的而旋转。在装配线上,旋转工具可能包括螺丝刀,钻头和夹具。倾斜感测线性速率运动时,旋转感测角速率运动。旋转也不同于倾斜,因为旋转可能不会发生可察觉的加速度变化,从而使加速度计无法用于此应用。例如,如果3轴加速度计绕着指向地球的z轴旋转,而x轴和y轴与地球平行,则Z轴将继续测量1 g,而X和Y轴仍为0g。在这种情况下,沿Z轴旋转加速度计将不会导致加速度计读数发生变化。相反,机器人使用 MEM陀螺仪,这是专门设计用于感应旋转的传感器。当陀螺仪传感器绕其轴旋转时,非常小的微处理质量通过科里奥利效应移动到传感器的外部。
图2 :MEM陀螺仪传感器的内部操作
在ADI的iSensor MEMS陀螺仪子系统被设计成可靠地检测和准确地测量物体的旋转角速率。iSensor陀螺仪坚固耐用,可以检测到机器人在严酷的环境下,严重的压力下以及复杂的工业条件下的旋转。陀螺仪并非一应俱全,对于给定的旋转,选择正确的陀螺仪很重要。范围和灵敏度是两个重要的指标。该范围是陀螺仪可以准确测量的最快转速,以每秒度数(°/ sec)为单位。灵敏度是给定速度下以毫伏为单位的输出变化-因此陀螺仪旋转得越快,电压就越高。单位为毫伏/度/秒(mV /°/秒)。
快速旋转的工具需要很高的量程,例如ADI公司的ADIS16266BCCZ 可以测量高达±14,000°/ sec的速度。ADI ADIS16060BCCZ可以为缓慢旋转的臂提供服务, 其范围仅为±80°/ sec。在工业机器人上以这些低电压运行的模拟陀螺仪要求互连损耗低。的弥足-P25微型防水连接器从 Molex公司是一个微型IP67密封连接器系统,其防尘防水。它也适用于高振动环境,接触电阻仅为10mΩ,适用于恶劣环境的低压系统。
机器人有时会偶然或故意撞到东西上。震动是加速度的突然变化,因此可以通过加速度计轻松检测到。但是,当检测到震动时,加速度计的位置至关重要。例如,与手臂或肘部相反,意外碰到地板的机器人手会受到更大的冲击(加速度变化)。
在某些情况下,必须立即检测到电击,以便立即做出决定并采取行动。笔记本电脑中常见的硬盘驱动器就是一个非常关键的例子。如果硬盘驱动器掉落并撞到硬地板,则驱动器中的加速度计会立即检测到震动。在这种情况下,硬盘驱动器磁头绝对必须在几毫秒内停放磁头,否则将面临数据丢失的痛心。显然,对此类事件的正确检测取决于加速度计在驱动器上的正确位置以及可靠的处理器和可靠的固件。
将其与经过预编程动作的机械臂组装线进行对比。如上一节所述,战略性放置的加速度计将感应手臂的倾斜和位置,以确保运动正确。但是,如果运动因障碍而中断,则至关重要的是要迅速而可靠地检测到所产生的冲击。一个真正的危险是,一个人应对封锁负责,现在正处于伤害之中。在这种情况下,将使用专用的加速度计来检测震动,在某些情况下,可以放置两个或多个冗余的加速度计,每个都有自己的检测电路,以提供绝对的安全性。
机器人振动很少是一件好事。这可能表示轴承磨损,缺少部件,润滑不当,电枢未正确对准或机器人系统承受的负载不平衡。在这种情况下,振动既是维护又是安全问题。监视工业机器人,系统诊断和安全关闭感应可能需要监视工业机器人中的振动。
带有嵌入式RF收发器的Analog Devices ADIS16229数字MEM振动传感器提供了便携式振动传感平台,并为工业应用提供无线支持。它为监视和记录工业环境中的振动提供了完整的传感解决方案。诸如Molex黄铜SMA射频连接器之类的 射频连接器安装在板上,并带有螺纹连接,可在剧烈振动下支持牢固的配合。Molex SMA射频连接器在该板的900MHz以上的射频传输频率上将反射和衰减降至最低。
图3 :带有Molex黄铜SMA RF连接器的Analog Devices ADIS16000数字MEMs振动传感器和RF收发器。
检测加速度和减速度通常对于运动感测很重要。这可能意味着从感测机械臂中的运动到在航位推算系统中使用时确定机器人的位置等任何含义。加速度计还可用于确定是否已拾取或放下物体。可以使用专用的MEMs加速度计来确定机器人的加速度,而这完全独立于其他传感器。在这种情况下,如果外力有助于机器人的行为,并试图以超出所需的速度并以有害速度加速机器人,则可以检测到快速加速并且机器人会关闭。
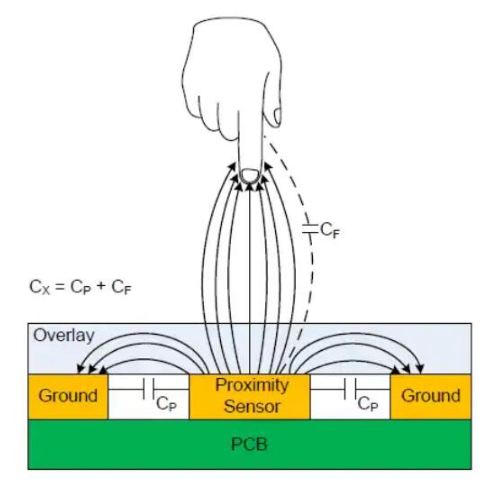
出于安全和操作方面的考虑,接近传感器可以检测附近物体的存在,而无需进行任何物理接触。的CapSense器件从 赛普拉斯半导体能够检测没有任何物理接触附近物体的存在。与任何赛普拉斯先锋套件连接时 ,赛普拉斯CY8CKIT-024 CapSense邻近防护罩提供了动态的开箱即用的接近感测开发解决方案。当CapSense接近传感器被电压源激励时,如图4所示,在传感器周围会产生电场。一些电场线会投射到地面以及附近空间,从而产生可以测量的电容。如果装配线上的目标物体接近机器人的接近传感器,则某些电场线会耦合到目标物体,从而改变电容,然后CapSense电路会测量电容以确定目标物体的距离和位置。
图4 :赛普拉斯CapSense接近传感器将电场线耦合到手指。
对于图4:C X =赛普拉斯CapSense接近感应系统测得的总电容;C P =传感器寄生电容;C F =附近目标物体相加的电容。对于机器人应用,此解决方案提供了三维对象或手势识别。这对于装配线上的机器人确定目标物体是否在距离之内很有用。它也可用于在震动传感器测量冲击之前确定障碍物是否即将干扰机器人。
MEMs传感器对于当今的机器人而言,在操作,安全和维护方面都是必需的。陀螺仪和功能广泛的加速度计构成了机器人传感器网络的核心,而更多深奥的传感器系统则用于接近传感。具有固态互连解决方案的高级MEMs传感器正在扩展当今机器人的功能,提供可在降低成本的同时提高性能的操作和安全功能。
来源:贤集网
点赞
收藏