步行机器人被认为是一种很有前途的解决方案,通过不规则或粗糙的地形。当轮式或履带式机器人需要像道路或车道一样平坦的地面时,行走机器人可以适应几乎任何地形类型。然而,即使对于拥有高自由度的多腿机器人来说,克服各种地形障碍仍然是一项具有挑战性的任务。
该研究提出了一种基于触觉传感器和生成递归神经网络进行位置误差预测的步行机器人克服障碍的新方法。通过将触觉传感器放置在腿的前部,研究者证明了机器人能够在不同复杂的地形中成功地克服接近机器人高度的障碍物。
地球上大部分的地形都是不平坦的,并且充满了各种各样的障碍,这使得传统的轮式车辆在没有道路的情况下很难在自然环境下到达目的地。这些车辆特别需要用于各种关键应用,如救援,灾害管理或边境安全巡逻。针对越野环境,新型汽车正在开发中。研究人员的目标是设计自主导航机器人,能够从环境收集的数据中获取并受益,以克服任何障碍,并在不确定环境中进行稳定导航。虽然对于接收到的数据进行图像识别,例如Kinect RGB-D相机,可以在未知环境下进行定位和制图,但仍然不能解决克服障碍的问题。
通常,大自然提供了开发此类车辆的灵感,激发了新型和更通用的车辆,如机器人的设计。自然界中最普遍的运动方式是步行。在动物界、昆虫界、鸟类和鱼类界中,没有轮式或跟踪式的移动。因此,两足、四足或六足步行机器人被认为是最通用的机器人,因为它们能够适应各种地形。然而,即使在平坦的表面上行走并不复杂,但当表面粗糙或有障碍时,这个过程就变得复杂了。在异构环境中执行任务时,有腿机器人可以根据障碍物的不同特性来计划克服、走过或爬过障碍物。必须检测到障碍物,并以最小的路径轨迹误差翻过或绕过障碍物。这意味着为了在复杂的动态环境中实现稳定的运动,必须采用传感器和障碍物克服方法。
多年来,人们对有腿机器人进行了不同类型的研究。最吸引人的课题是步行稳定性、能量效率、步态选择和过渡、不规则地形穿越、带有腿部故障的运动和用于环境识别的感觉系统。解决这些问题有很多应用,包括导航和物联网。在机器人稳定性方面,有人开发了基于脚力感知的足力稳定裕度(FFSM)和修正的足力稳定裕度(MFFSM)方法来计算系统的稳定性。仿生反应稳定性控制方法用于稳定足力余量,旨在帮助有腿机器人在失去稳定性后恢复,并在外界干扰下保持稳定性。
有人采用了具有高级步态规划器、低级轨迹规划器和控制器的分层控制体系结构。根据动态环境下机器人的步态和轨迹变化,采用卡尔曼滤波来监控机器人的稳定性。在另一项研究中,使用LTL- a算法计算由线性时态逻辑(LTL)和加权转移系统指定的全局最优路径。另一方面,最近提出了神经网络和基于深度学习的方法,如径向基函数神经网络(RBFNN)应用于工业制造商r15机器人的轨迹跟踪,采用了基于网格的随机地图搜索。
最近,许多混合动力和自然等提出了粒子群算法optimization-modified频率蝙蝠(PSO-MFB)算法对多目标路径规划,萤火虫在高度不确定的环境中轨迹规划算法,蜻蜓算法混合甲虫天线搜索(BAS)和人工势场算法(APF)。
能源效率非常重要,因为为了延长机器人在这种潜在的危险环境下的运行时间,必须将能源消耗降到最低。行走机器人由于有大量的自由度(DOF),消耗了大量的能量,因为除了有效载荷之外,它们还必须携带自己的重量。能量消耗还取决于地形类型、运动速度、摩擦和其他步行参数(如步幅和步态)。这就是为什么运动步态应该根据的情况进行优化选择或采用。为了使步行机器人的能量消耗最小化,需要估计步行过程中足部力的分布。
在关键情况下,机器人的腿可能会断或锁定由于电流故障。为了完成给定的任务,机器人应该能够在断开一条或多条腿的情况下继续移动。该问题的解决方案之一是使用容错雅可比矩阵对运动规划进行线性分析,从而使机器人能够使用断腿来执行所需的运动。另一项研究用一个平行的六足机器人来证明,即使有一条腿被锁住或者一条腿出现故障,机器人也能够继续移动。
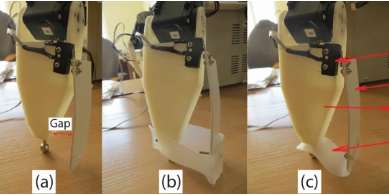
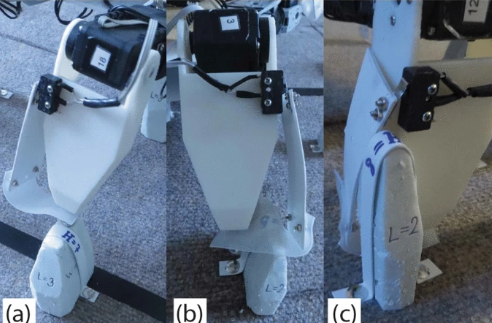
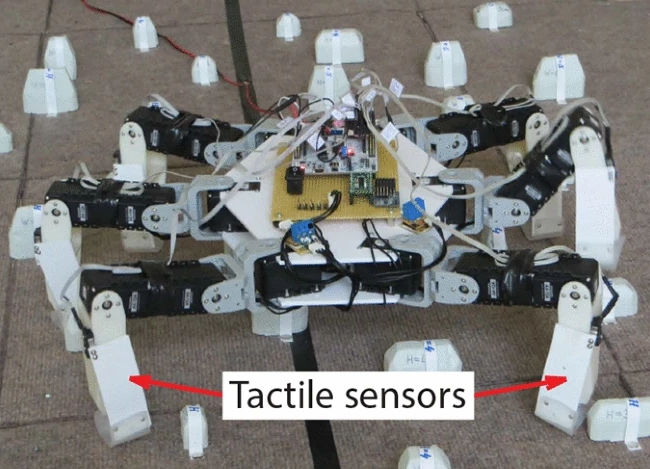
研究者提出了一种新的克服障碍的方法,使用附着在机器人腿上的触觉传感器。在大多数情况下,腿部机器人使用脚上的触觉传感器来显示腿部位置。在研究者的例子中,机器人在每条腿的前侧安装了触觉传感器,提供了每条腿前面都有障碍物的信息。这种方法还允许对障碍作出反应。为了测试触觉障碍的克服方法,研究者使用了一个18自由度的六足步行机器人。每个触觉传感器值为每个控制程序周期检查,大约几毫秒。
实验结果表明,机器人偏离了目标运动轨迹。当机器人用腿检测障碍物时,由于克服障碍的轨迹是在新的一步中启动的,所以引入了一定的误差。当机器人向后推到某个障碍物时,剩下的腿仍在继续向前移动。当机器人左转或右转时,也会出现同样的情况。因此,机器人将失去距离并偏离某一侧(取决于哪一边是障碍物所在)。
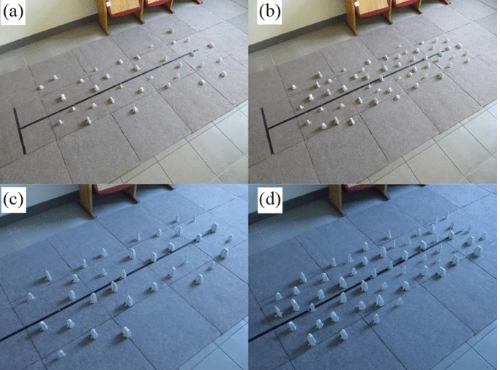
当使用波步态时,可以在任何类型的地形和距离上获得令人满意的运动效果。尽管距离越长,障碍物越高,误差越大,机器人仍然能够克服所有遇到的障碍。对于三脚架步态,运动也是可能的,但由于较高的运动速度和腿部转移顺序,造成的误差更多是随机的。最后,通过对波和三脚架步态误差的比较,研究者可以发现,虽然慢速步态提供了较好的总体效果,但更快的步态仍可用于在较小高度障碍的地形上短距离行走。
为了进一步改进该方法,研究者计划在机器人控制系统中加入反馈,如定位传感器(加速器、陀螺仪等)。利用定位传感器,可以测量机器人的体位和方向角随局部位置的变化。所测位置可直接实现在机器人控制算法中,用于纠正运动误差和方向角。此外,研究者还打算增加更多和更复杂的传感器。用摄像机可以观察到机器人周围的环境和障碍物的位置。这样就有可能克服一些减少错误的障碍。最后,还可以对克服障碍的腿部轨迹进行改进。在该研究中,研究者介绍了步行机器人触觉障碍克服方法的发展。该方法结合了覆盖在机器人腿前部的触觉传感器的数据、避障腿轨迹的计算和纵向空间误差的预测。
这一组合提供了良好的障碍检测和克服的结果,达到12%的误差,人为非结构化环境。研究者使用了一个六足机器人,并在不同类型的地形上进行了大量的实验。结果表明,该混合障碍物克服方法在各种障碍物地形上的行走运动中是一种成功的应用。克服障碍的方法不需要重新计算路径轨迹来克服小的地形障碍,因为机器人能够以足够高的精度在中间点之间直线移动。
研究者还确定,在大多数地形类型上,使用慢步态比快速步态更有效,但快速步态可以用于较短的距离和较小的高度障碍。该方法在不使用额外的定位传感器来消除运动误差或方向角变化的情况下,也能有效地改善步行运动。因此,由于触觉克服方法不需要很高的计算能力,并且能够承受与障碍物的碰撞,因此它可以作为一种主要的障碍物检测系统或备用反馈应用于任何类型的步行机器人。
(文章来源于贤集网)





























