
 加客服免费发需求
加客服免费发需求
 联系客服咨询项目
联系客服咨询项目


还记得那个专注于模仿人类上半身的机器人吗?五个多月前,英国线上零售商Ocado发布的ARMAR-6协作机器人第一阶段研发工作宣告结束,它也是欧盟SencondHands财团计划的项目之一。
造型看起来好像千手观音,不过ARMAR-6实际上只有两只手,可以轻松抬起箱子:当然,ARMAR-6最厉害的地方不是抬箱子,他还会像一个暖男一样默默观察你是否需要帮助,及时伸出援手。

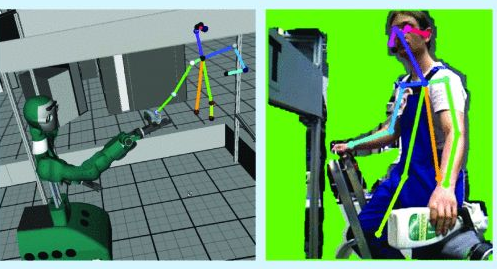
为了让ARMAR-6准确估计人的三维姿态,研究人员采用无标记的RGB-d图像采集方法,神经网络分类器可以利用人类的姿势来估计当前活动,人类的姿势也为机器人的切换控制器提供了输入,控制器在切换任务期间接收人的手势以适应进近运动并连续预测切换姿势。来自ARMAR-6腕部6D F / T传感器的力反馈用于触发与人交接任务中的手打开和关闭动作。机器人使用无标记的3D人体姿势估计和力反馈来识别人的意图,因此在需要时提供帮助。

通过该方法,ARMAR-6的能够对直接命令做出反应,例如,它听到“带上喷雾瓶”,然后立即执行;也可以从口头语言中推断出指令,当工作人员告诉机器人要清洁输送机时,ARMAR-6会得出结论,推断工作人员需要清洁液。

ARMAR-6具有28个活动自由度(DoF),最大高度为192cm,重量为160kg(加上40 kg的电池组)。机器人的硬件分为五个不同的模块化机器人系统,包括双臂系统,五指手,传感装置,躯干和移动平台。每个手臂关节都由高度集成的传感器-执行器-控制器(SAC)单元致动,这些模块化SAC单元包括无刷直流电动机和具有所有必要轴承的无齿隙谐波传动减速齿轮箱,以及全面的传感器套件,通信和电动机控制电子装置。增量和绝对位置编码器的精度为0.1°,分辨率为19b,可实现高度精确的位置和速度控制。
ARMAR-6配备了两只像人一样的五指手,具有人体比例的运动学特性,可以操纵不同的工具。手指关节由两个滚珠轴承支撑,通过自适应欠驱动机制将电机转矩分配给手指。该机制可帮助手指缠绕物体并自动适应其形状。
ARMAR-6采用了向轮式移动平台,可满足工业工作场所的所有要求。机器人可以自主运行,而无需外部电缆。它包含四台计算机和一个用于板载计算的GPU,一个音响系统,网络外围设备,电源管理系统以及一个1.8kWh的电池组,该电池组在标称工作条件下最多可进行4个小时的电力自主运行,所有组件均由玻璃纤维外壳覆盖并保护。
(文章来源于机器人在线网)























