摘要:
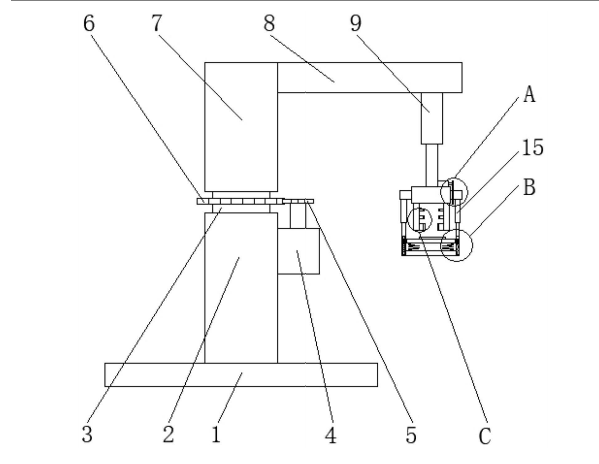
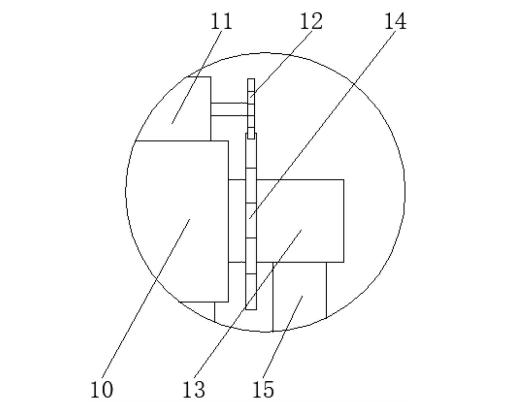
本实用新型公开了一种自动化设备的机械手装置,包括基板。基板的顶部固定连接有第一固定杆,第一固定杆的底部转动连接有连接杆,并且第一固定杆上固定连接有第一电机,第一电机的输出端固定连接有第一齿轮,连接杆的表面固定连接有第二齿轮,并且连接杆的顶端固定连接有第二固定杆,第二固定杆的一侧固定连接有支撑杆,支撑杆的底端固定连接有第一伸缩杆,第一伸缩杆的底部固定连接有连接块。
背景技术:
机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
现在也有很多的机械手,但是这种机械手上没有防滑和对物品的保护装置,有很多的物品表面光滑,并且物品上没有凹凸的面,会使机械手在拿取物品移动时,容易使物品滑落而造成不必要的损失。
实用新型内容:
针对现有技术的不足,本实用新型提供了一种自动化设备的机械手装置,解决了机械手在拿取物品是物品容易滑落的问题。
为实现以上目的,本实用新型通过以下技术方案予以实现:
一种自动化设备的机械手装置连接块的顶部固定连接有第二电机,第二电机的输出端固定连接有第三齿轮,连接块的两侧均转动连接有转动杆,转动杆的表面固定连接有第四齿轮,并且两个转动杆上均固定连接有第二伸缩杆,两个第二伸缩杆上开设有滑动槽,滑动槽的内部滑动连接有限位块,限位块上固定连接有滑动杆,滑动杆上固定连接有滑动板,滑动板的顶部固定连接有缓冲垫,并且滑动板的底部固定连接有第一弹簧。
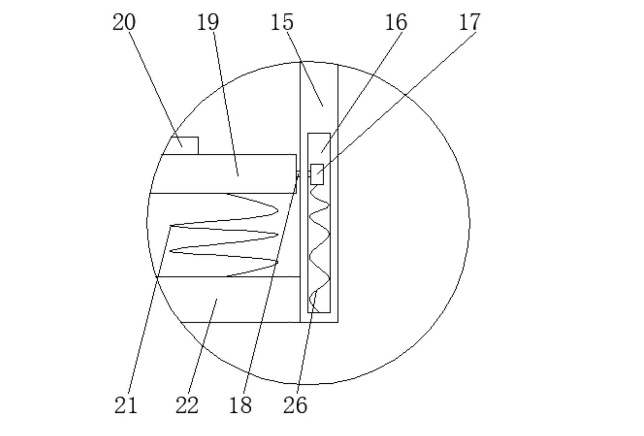
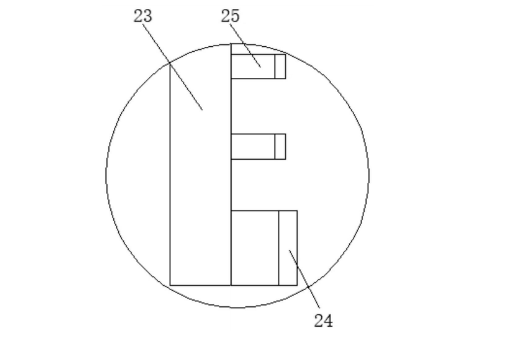
两个第二伸缩杆的底部固定连接有固定板,连接块的底部设置有两个机械手指,两个机械手指上固定连接有防滑垫,并且两个机械手指的内侧固定连接有多个防滑块,防滑块的一端固定连接有防滑垫。多个防滑块为四个,对称分布在机械手指的两侧。
两个第一弹簧位于滑动板与固定板之间。并且两个第一弹簧的弹力要大于滑动板的重力。第一齿轮与第二齿轮啮合,第三齿轮与第四齿轮啮合。固定板位于两个第二伸缩杆之间,第四齿轮位于连接块与第二伸缩杆之间。两个机械手指对称分布在连接块中心的两侧,两个第一弹簧对称分布在固定板的两侧。滑动槽的内部设置有第二弹簧,第二弹簧位于限位块与滑动槽之间。
与现有技术相比,本实用新型的有益效果是:
该自动化设备的机械手装置,通过机械手指上的防滑垫会与物品紧密相连从而增大物品在机械手指上的摩擦力,从而使物品可以稳定的在机械手指上,并且机械手指的内部有多个防滑块与物品紧密相连,从而增加机械手指上的防滑块与物品的接触面积,使物品在机械手指上移动时更加稳定,通过防滑垫增大与物品的摩擦力,从而防止物品的滑落,而且在底部设置缓冲垫与弹簧,在物品掉落时可以减少对物品的损害,从而减少经济损失。





























