本发明提供了某种视觉引导焊接方法及视觉引导焊接装置。视觉引导焊接方法通过视觉检测装置判断工件是否已施焊,并根据判断结果确定是否执行焊接操作。视觉引导焊接装置包括定位工装、视觉检测装置、施焊装置和驱动装置;视觉检测装置获取工位的图像并判断该工位上的工件是否已施焊,驱动装置接收并根据判断结果驱动施焊装置至工件位置处执行焊接操作或不驱动施焊装置。与现有技术相比,本发明通过利用视觉检测装置来实现焊件状态的判断,焊接位置的精准控制,实现效率和质量提升,降低售后投诉隐患。通过多组相机进行拍照并合成一张图像,将其与标准未施焊的图像进行色差对比分析,判断焊件是否需要施焊,有效避免二次焊接引起的过烧。
1.某种视觉引导焊接方法,其特征在于,包括以下步骤: 步骤c:视觉检测装置判断工件是否已施焊,若否,则执行步骤d;若是,则执行步骤e; 步骤d:将判断结果发送至驱动装置,所述驱动装置根据所述判断结果,将施焊装置驱动至工件位置处执行焊接操作; 步骤e:将判断结果发送至所述驱动装置,所述驱动装置根据所述判断结果不动作。
2.根据权利要求1所述的视觉引导焊接方法,其特征在于, 在所述步骤c之前,还包括以下步骤: 步骤a:所述视觉检测装置获取定位工装上工件安装工位的图像,根据所述图像判断所述工位上是否有工件,若是,则执行步骤c;若否,则执行步骤b; 步骤b:所述视觉检测装置不动作。
3.根据权利要求1所述的视觉引导焊接方法,其特征在于, 在步骤d之后,还包括步骤f:所述视觉检测装置测量工件位置,并将工件位置信息反馈给所述驱动装置,所述驱动装置根据所述位置信息进行路径规划,并驱动所述施焊装置到达至工件位置处执行焊接操作。
4.根据权利要求1所述的视觉引导焊接方法,其特征在于, 在所述步骤c中,所述视觉检测装置将工件的图像与预存的标准未施焊的工件图像进行色差对比分析,判断工件是否已施焊。
5.根据权利要求4所述的视觉引导焊接方法,其特征在于, 在所述步骤c中,指定工件焊点位置处上下8mm-12mm的范围为对比范围,工件的图像与预存的标准未施焊的工件图像在所述对比范围内进行色差对比分析。
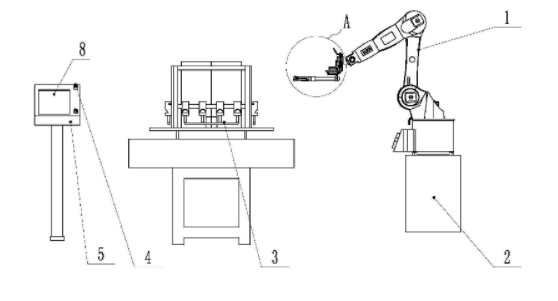
6.某种视觉引导焊接装置,其特征在于,包括: 定位工装,其上设置有用于固定工件的工位; 视觉检测装置,其用于获取所述工位的图像并判断该工位上的工件是否已施焊; 施焊装置,其设置在驱动装置上;以及 驱动装置,其与所述视觉检测装置相连,所述驱动装置用于根据视觉检测装置的判断结果驱动所述施焊装置至工件位置处执行焊接操作或不驱动所述施焊装置。
7.根据权利要求6所述的视觉引导焊接装置,其特征在于,所述定位工装为圆盘定位工装,其上设置有多个工位;所述视觉检测装置根据所述图像判断所述工位上是否有工件,所述圆盘定位工装根据判断结果不动作或旋转至下个工位。
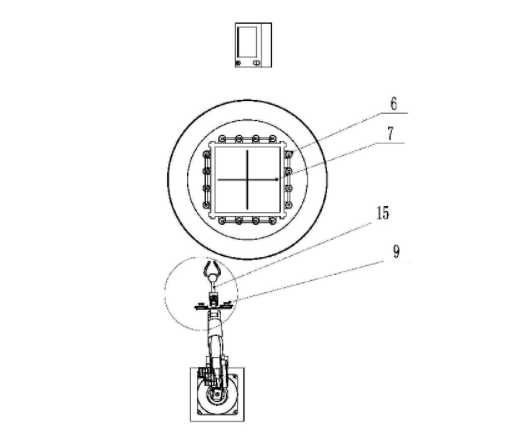
8.根据权利要求6所述的视觉引导焊接装置,其特征在于,所述视觉检测装置包括图像获取装置和控制台;所述图像获取装置用于获取所述工位的图像并将所述图像发送至所述控制台;所述控制台判断工位上的工件是否已施焊,并将判断结果发送至所述驱动装置。
9.根据权利要求8所述的视觉引导焊接装置,其特征在于,所述视觉检测装置还包括环形光源,所述环形光源用于照亮所述工位,所述图像获取装置设置在所述环形光源的几何中心。
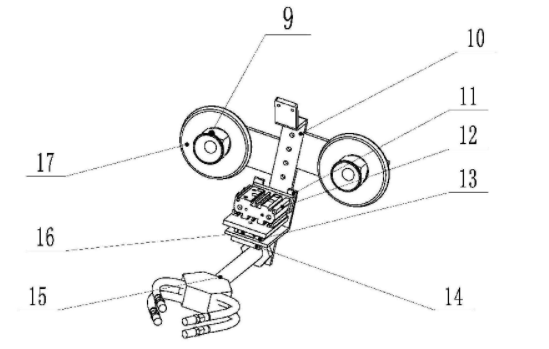
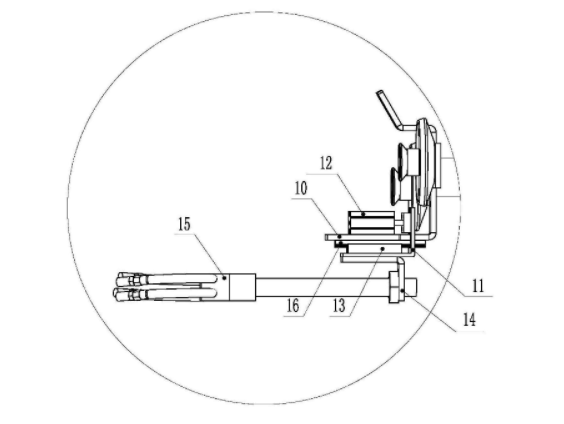
10.根据权利要求6所述的视觉引导焊接装置,其特征在于,所述施焊装置包括焊枪、气缸、滑块、导轨、第一连接件、第二连接件和第三连接件; 所述第一连接件固定在所述驱动装置上,气缸的本体和所述导轨均固定在所述第一连接上并且所述导轨位于所述气缸的下方,气缸的活塞通过第二连接件连接滑块和第三连接件,所述滑块顶部设置有凹槽,所述滑块通过所述凹槽与所述导轨形成滑动连接,所述第三连接件连接焊枪,所述气缸的活塞伸缩带动所述焊枪往复运动。
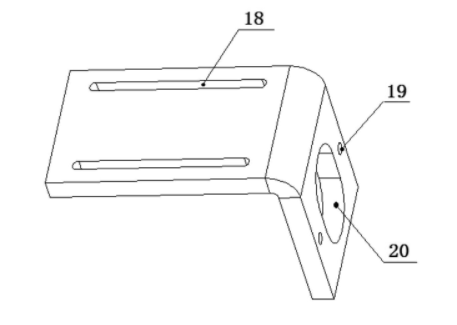
11.根据权利要求10所述的视觉引导焊接装置,其特征在于,所述第三连接件包括连接为一体的水平连接板和竖直连接板,所述水平连接板上设置有第一滑槽,所述第二连接件上设置有螺孔,所述水平连接板与所述第二连接件之间通过依次穿过所述第一滑槽和所述螺孔的螺钉固定;所述竖直连接板上设置有第二滑槽,所述第二滑槽两侧分别设置有螺孔,所述焊枪的一端插入所述第二滑槽内,所述竖直连接板与所述焊枪通过穿过所述螺孔的螺钉固定。
12.根据权利要求6所述的视觉引导焊接装置,其特征在于,还包括气体保护管路,所述气体保护管路上设置出气嘴,所述气体保护管路内充装有惰性气体,所述惰性气体由所述出气嘴喷至所述定位工装上的工件上。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























