本发明公开了某种基于视觉的集装箱门锁杆变形检测方法,包括如下步骤:采集图像并标注;训练检测模型和分割模型;获取当前作业集装箱的箱门图像;图像检测裁剪;利用集装箱门锁杆分割模型对裁剪后的图像进行前景分割;对门锁杆二值图像进行连通域标记,然后对每个连通域分别提取骨架;对所有点的二次导数值的绝对值求和;特征值大于阈值,则判断该连通域对应的门锁杆存在变形,反之则该连通域对应的门锁杆正常。本发明利用视觉检测技术在集装箱装卸作业过程中自动对其门锁杆进行检测并返回结果。解决了现有基于人工的集装箱门锁杆检测的缺点且现有常规的视觉检测算法无法直接应用于门锁杆检测的问题。
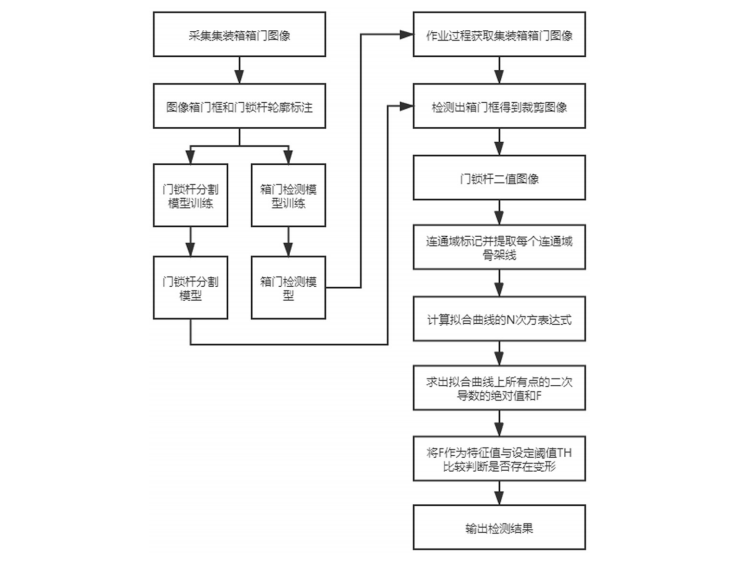
1.某种基于视觉的集装箱门锁杆变形检测方法,包括如下步骤: S1、通过摄像头采集大量包含集装箱箱门的图像,对图像中的集装箱箱门和门锁杆轮廓进行标注; S2、利用获取的图像和标注数据训练集装箱箱门检测模型和集装箱门锁杆分割模型; S3、在集装箱装卸船作业过程中,通过摄像头获取当前作业集装箱的箱门图像; S4、利用集装箱箱门检测模型对当前作业图像进行检测,得到集装箱箱门框坐标;根据该坐标对当前作业图像进行裁剪,得到裁剪后只包含集装箱箱门的图像; S5、利用集装箱门锁杆分割模型对裁剪后的图像进行前景分割,得到门锁杆二值图像; S6、对门锁杆二值图像进行连通域标记,然后对每个连通域分别提取骨架,得到每个连通域的骨架线; S7、分别计算每个连通域骨架线的拟合曲线,得到该拟合曲线的五次方函数的表达式,根据该表达式计算拟合曲线的二次导数函数,根据该函数得到拟合曲线上每个点的二次导数值,对所有点的二次导数值的绝对值求和; S8、二次导数绝对值的和作为一根门锁杆连通域的特征值F,设定一个阈值TH,若特征值F>TH则判断该连通域对应的门锁杆存在变形,反之则该连通域对应的门锁杆正常。
2.根据权利要求1所述的某种基于视觉的集装箱门锁杆变形检测方法,其特征在于:所述步骤S1中采用现有的图像标注软件对图像进行标注,其中箱门标注矩形框用左上和右下两个点来表示,门锁杆标注轮廓,用其边缘点的集合来表示。
3.根据权利要求2所述的某种基于视觉的集装箱门锁杆变形检测方法,其特征在于:所述步骤S2中集装箱箱门检测模型采用yolov5检测模型,门锁杆分割模型采用u-net分割模型,箱门矩形框数据用于检测模型的训练,门锁杆轮廓点数据用于分割模型的训练。
4.根据权利要求1或3所述的某种基于视觉的集装箱门锁杆变形检测方法,其特征在于:所述步骤S3中过程中获取的图像必须包含完整的集装箱箱门,并采用距离传感器触发的方式来获取图像。
5.根据权利要求1所述的某种基于视觉的集装箱门锁杆变形检测方法,其特征在于:所述步骤S4中将图像输入检测模型,选取置信度大于0.5的检测框作为候选框,最后通过NMS非极大值抑制的方法去除重叠框得到最终检测结果。
6.根据权利要求1所述的某种基于视觉的集装箱门锁杆变形检测方法,其特征在于:所述步骤S5中将裁剪后的图像输入分割网络,将置信度大于0.3的点标记为前景点,其余点为背景点,得到门锁杆分割结果的二值图。
7.根据权利要求1所述的某种基于视觉的集装箱门锁杆变形检测方法,其特征在于:所述步骤S8中将检测结果返回给作业系统,以便其根据检测结果进行后续操作和问题记录。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























