本发明公开了某种智能汽车底盘检测方法及装置,该方法包括:移动被检车辆以使横向第一连接轴位于间隙仪的上方;根据车辆信息对底盘进行视觉检测;根据车辆信息对横向第一连接轴进行力学检测,完成力学检测后,间隙仪的左滑平台位于左侧第一预设位置且右滑平台位于右侧第一预设位置,横向第一连接轴处于拉伸状态;保持横向第一连接轴处于拉伸状态的情况下,移动被检车辆以使横向第二连接轴位于间隙仪的上方,被检车辆移动过程中对横向第一连接轴进行力学检测;对横向第二连接轴进行力学检测。本发明可对移动中的车辆进行力学检测,从而实现车辆底盘缺陷的动态分析,检测更为全面,准确。
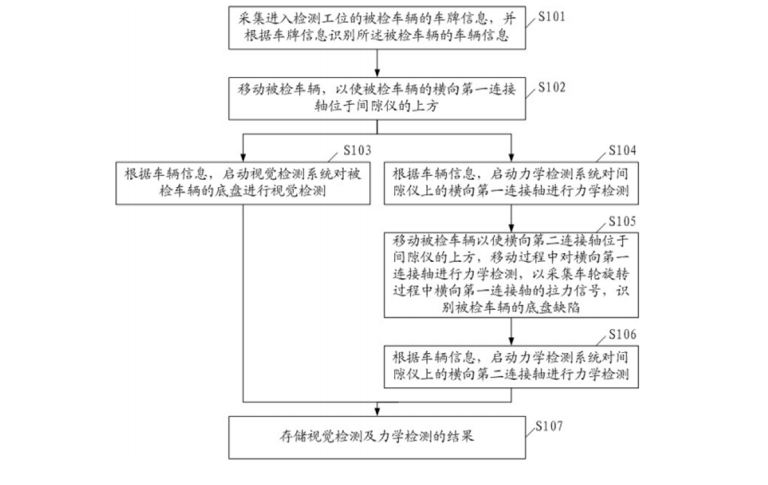
1.某种智能汽车底盘检测方法,其特征在于,包括: 采集进入检测工位的被检车辆的车牌信息,并根据所述车牌信息识别所述被检车辆的车辆信息; 移动所述被检车辆,以使所述被检车辆的横向第一连接轴位于间隙仪的上方,此时,所述间隙仪的左滑平台位于左侧初始位置且右滑平台位于右侧初始位置,所述横向第一连接轴处于初始状态; 根据所述车辆信息,启动视觉检测系统对所述被检车辆的底盘进行视觉检测; 根据所述车辆信息,启动力学检测系统对所述间隙仪上的横向第一连接轴进行力学检测,其中,完成力学检测后,所述间隙仪的左滑平台位于左侧第一预设位置且右滑平台位于右侧第一预设位置,所述横向第一连接轴在所述间隙仪的作用下处于拉伸状态,所述左侧初始位置与右侧初始位置之间的距离小于所述左侧第一预设位置与右侧第一预设位置之间的距离; 保持所述横向第一连接轴处于拉伸状态的情况下,移动所述被检车辆,以使所述被检车辆的横向第二连接轴位于所述间隙仪的上方,被检车辆移动过程中启动力学检测系统对横向第一连接轴进行力学检测,以实时采集车轮旋转过程中横向第一连接轴的拉力信号,并根据所述拉力信号识别所述被检车辆的底盘缺陷,根据所述拉力信号识别的所述被检车辆的所述底盘缺陷为底盘连杆连接质量; 根据所述车辆信息,启动力学检测系统对所述间隙仪上的横向第二连接轴进行力学检测; 存储所述视觉检测及力学检测的结果。
2.如权利要求1所述的智能汽车底盘检测方法,其特征在于,所述根据所述拉力信号识别所述被检车辆的底盘缺陷的步骤包括: 将所述拉力信号分割为多个拉力信号段; 分别计算每一拉力信号段的拉力变化频率,以生成多个拉力变化频率; 根据预设权重系数对所述拉力变化频率进行加权处理,生成并输出缺陷值,其中,所述拉力变化频率越小,所述拉力变化频率对应的预设权重系数越大; 将所述缺陷值与预设缺陷类型进行比对,识别底盘缺陷。
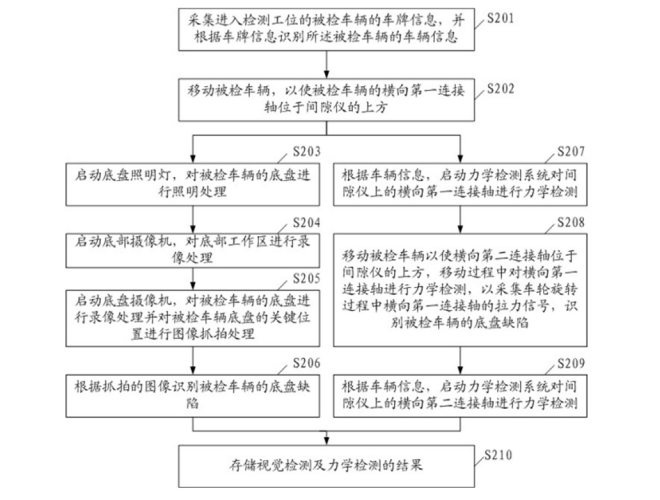
3.如权利要求1所述的智能汽车底盘检测方法,其特征在于,所述启动视觉检测系统对底盘进行视觉检测的步骤包括: 启动底盘照明灯,对所述被检车辆的底盘进行照明处理; 启动底部摄像机,对底部工作区进行录像处理; 启动底盘摄像机,对所述被检车辆的底盘进行录像处理并对所述被检车辆底盘的关键位置进行图像抓拍处理; 根据抓拍的图像识别所述被检车辆的底盘缺陷。

4.如权利要求1所述的智能汽车底盘检测方法,其特征在于, 所述启动力学检测系统对横向第一连接轴进行力学检测的步骤包括: 驱动所述间隙仪的左滑平台及右滑平台,以使所述左滑平台及右滑平台向预设方向移动; 所述横向第一连接轴所对应的车轮随所述左滑平台及右滑平台移动,并拉动所述被检车辆的底盘连杆; 实时采集所述左滑平台及右滑平台移动过程中的拉力信号; 根据所述拉力信号识别所述被检车辆的底盘缺陷; 所述启动力学检测系统对横向第二连接轴进行力学检测的步骤包括: 驱动所述间隙仪的左滑平台及右滑平台,以使所述左滑平台及右滑平台返回初始位置; 所述横向第二连接轴所对应的车轮随左滑平台及右滑平台移动,并拉动底盘连杆; 实时采集所述左滑平台及右滑平台移动过程中的拉力信号; 根据所述拉力信号识别所述被检车辆的底盘缺陷。
5.如权利要求4所述的智能汽车底盘检测方法,其特征在于, 所述左滑平台及右滑平台向预设方向移动的移动路径为:所述左滑平台及右滑平台同时沿被检车辆的宽度方向向两侧移动,以使左滑平台移动至左侧第一预设位置且右滑平台移动至右侧第一预设位置,然后所述左滑平台沿被检车辆的高度方向上移动至左侧第二预设位置、沿被检车辆的长度方向后移动至左侧第三预设位置、沿被检车辆的高度方向下依次移动至左侧第四预设位置及左侧第五预设位置、沿被检车辆的长度方向前依次移动至左侧第六预设位置及左侧第七预设位置、沿被检车辆的高度方向上依次移动至左侧第八预设位置及左侧第九预设位置、返回左侧第一预设位置; 所述左滑平台及右滑平台返回初始位置的移动路径为:所述左滑平台沿被检车辆的高度方向上移动至左侧第二预设位置、沿被检车辆的长度方向后移动至左侧第三预设位置、沿被检车辆的高度方向下依次移动至左侧第四预设位置及左侧第五预设位置、沿被检车辆的长度方向前依次移动至左侧第六预设位置及左侧第七预设位置、沿被检车辆的高度方向上依次移动至左侧第八预设位置及左侧第九预设位置、返回左侧第一预设位置,然后所述左滑平台及右滑平台返回初始位置。
6.如权利要求1所述的智能汽车底盘检测方法,其特征在于,所述移动所述被检车辆,以使被检车辆的横向第一连接轴位于间隙仪的上方的步骤包括: 所述被检车辆沿检测工位移动; 当所述被检车辆的车轮驶入所述间隙仪的上方时,所述被检车辆停止移动; 所述间隙仪上的到位检测器实时判断所述被检车辆是否到位, 判断为否时,提示所述被检车辆前移, 判断为是时,则表示所述被检车辆的横向第一连接轴位于所述间隙仪的上方。
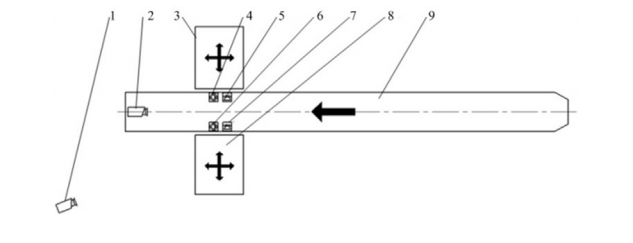
7.某种智能汽车底盘检测装置,其特征在于,包括车辆识别系统、底部工作区、间隙仪、视觉检测系统、力学检测系统及处理系统,所述间隙仪设于所述底部工作区的上方; 所述车辆识别系统用于采集进入检测工位的被检车辆的车牌信息,并根据所述车牌信息识别所述被检车辆的车辆信息; 所述视觉检测系统设于所述底部工作区内,用于根据所述车辆信息对所述被检车辆的底盘进行视觉检测;视觉检测时,所述被检车辆的横向第一连接轴位于间隙仪的上方,所述间隙仪的左滑平台位于左侧初始位置且右滑平台位于右侧初始位置,所述横向第一连接轴处于初始状态; 所述力学检测系统设于所述间隙仪上,用于根据所述车辆信息对所述间隙仪上方的横向第一连接轴及横向第二连接轴进行力学检测;其中,完成对所述间隙仪上方的横向第一连接轴进行力学检测后,所述间隙仪的左滑平台位于左侧第一预设位置且右滑平台位于右侧第一预设位置,所述横向第一连接轴在所述间隙仪的作用下处于拉伸状态,所述左侧初始位置与右侧初始位置之间的距离小于所述左侧第一预设位置与右侧第一预设位置之间的距离;然后,保持所述横向第一连接轴处于拉伸状态的情况下,移动所述被检车辆,以使所述被检车辆的横向第二连接轴位于所述间隙仪的上方,被检车辆移动过程中启动力学检测系统对横向第一连接轴进行力学检测,以实时采集车轮旋转过程中横向第一连接轴的拉力信号,并根据所述拉力信号识别所述被检车辆的底盘缺陷,根据所述拉力信号识别的所述被检车辆的所述底盘缺陷为底盘连杆连接质量; 所述处理系统与所述视觉检测系统及力学检测系统分别连接,用于存储所述视觉检测及力学检测的结果。
8.如权利要求7所述的智能汽车底盘检测装置,其特征在于,所述视觉检测系统包括: 底盘照明灯,用于对所述被检车辆的底盘进行照明处理; 底部摄像机,用于对底部工作区进行录像处理; 底盘摄像机,用于对所述被检车辆的底盘进行录像处理并对所述被检车辆底盘的关键位置进行图像抓拍处理; 视觉识别器,用于根据抓拍的图像识别所述被检车辆的底盘缺陷。
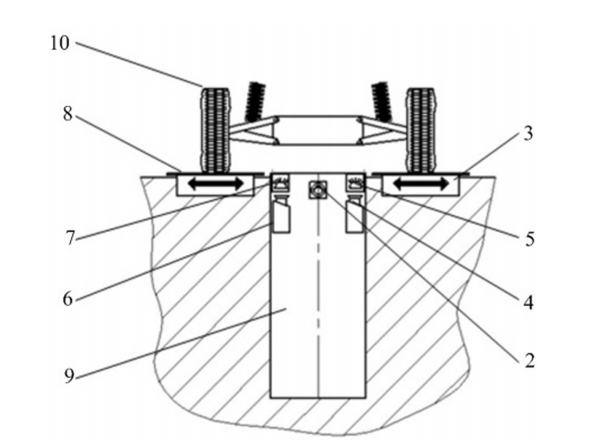
9.如权利要求7所述的智能汽车底盘检测装置,其特征在于,所述间隙仪包括左滑平台及右滑平台; 所述力学检测系统包括设于所述间隙仪上的拉力传感器及力学识别器,所述拉力传感器用于实时采集所述左滑平台、右滑平台及被检车辆移动过程中的拉力信号,所述力学识别器用于根据所述拉力信号识别所述被检车辆的底盘缺陷; 所述力学检测系统对横向第一连接轴进行力学检测时,所述左滑平台及右滑平台向预设方向移动,所述横向第一连接轴所对应的车轮随所述左滑平台及右滑平台移动,并拉动所述被检车辆的底盘连杆; 所述力学检测系统对横向第二连接轴进行力学检测时,所述左滑平台及右滑平台返回初始位置,所述横向第二连接轴所对应的车轮随左滑平台及右滑平台移动,并拉动底盘连杆。
10.如权利要求9所述的智能汽车底盘检测装置,其特征在于,所述间隙仪上还设有到位检测器; 所述到位检测器用于实时判断被检车辆是否到位,当所述到位检测器检测到所述被检车辆未到位时,则提示所述被检车辆前移,当所述到位检测器检测到所述被检车辆到位时,则表示所述被检车辆的横向第一连接轴位于所述间隙仪的上方。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























