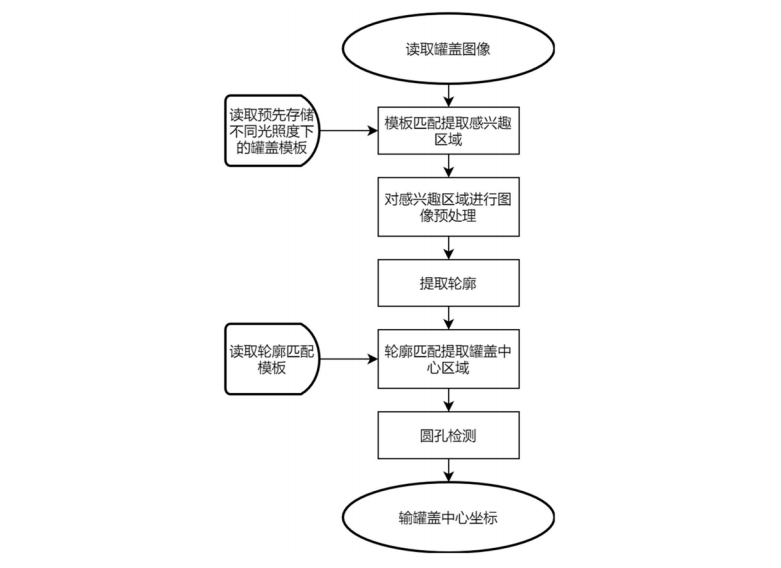
本发明提供了某种罐盖视觉检测与定位方法,包括如下步骤:目标识别步骤:针对罐盖图像进行模板匹配,获取感兴趣区域;初步定位步骤:对于获取到的感兴趣区域进行轮廓匹配正六边形模板,缩小检测区域;精确定位步骤:根据罐盖中心的灰度特性进行阈值分割,提取中心孔作为罐盖中心;位姿解算步骤:根据标定的位姿关系解算出罐盖中心在世界坐标系下的二维坐标,并将其与高度传感器得到的数据融合,得到罐盖中心在世界坐标系下的三维坐标。本发明通过预先存储不同光照度下的模板,避免复杂的算法,同时又能满足不同环境下的检测需求,解决了光照条件对检测的影响,并通过模板匹配和轮廓匹配两种不同方法两次缩小了检测范围,确保能更准确地检测罐盖中心。
1.某种罐盖视觉检测与定位方法,其特征在于,包括如下步骤: 目标识别步骤:针对罐盖图像进行模板匹配,获取感兴趣区域; 初步定位步骤:对于获取到的感兴趣区域进行轮廓匹配模板,缩小检测区域; 精确定位步骤:根据罐盖中心的灰度特性进行阈值分割,提取中心孔作为罐盖中心; 位姿解算步骤:根据标定的位姿关系解算出罐盖中心在世界坐标系下的二维坐标,并将其与高度传感器得到的数据融合,得到罐盖中心在世界坐标系下的三维坐标。
2.根据权利要求1所述的罐盖视觉检测与定位方法,其特征在于,所述目标识别步骤包括: 模板存储步骤:在作业区域内,拍摄多张不同光照情况下罐盖图像存储作为模板; 模板匹配步骤:将存储的模板在待检测图像内遍历,依次按照顺序进行比较,选择匹配度最高的区域作为感兴趣区域。
3.根据权利要求1所述的罐盖视觉检测与定位方法,其特征在于,所述初步定位步骤包括: 图像预处理步骤:对感兴趣区域进行高斯滤波去除噪声,选择合适的阈值对感兴趣区域进行二值化; 提取轮廓步骤:使用Canny边缘检测算子在感兴趣区域内进行轮廓的提取; 轮廓筛选步骤:根据罐盖在图像中的尺寸,设置轮廓长度和面积最小值,去除产生干扰的轮廓; 轮廓匹配步骤:利用事先存储的轮廓匹配模板对每个轮廓进行匹配,选择匹配度最高的轮廓,提取罐盖中心金属板的特定轮廓。
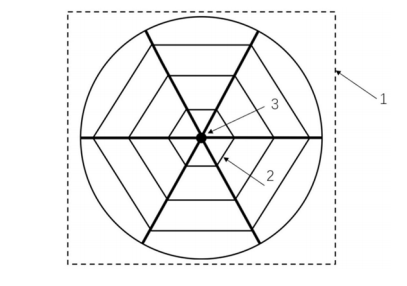
4.根据权利要求1所述的罐盖视觉检测与定位方法,其特征在于,所述精确定位步骤包括: 划定检测区域步骤:以提取到的特定轮廓中心为圆心,提取周围200*200像素的区域,缩小检测区域; 阈值分割步骤:利用罐盖中心孔的灰度特性,设置阈值,对新的检测区域进行阈值分割,得到罐盖中心孔的轮廓; 中心孔拟合步骤:对得到的中心孔轮廓进行最小外接圆拟合,并提取外接圆形的中心作为罐盖中心。
5.根据权利要求1所述的罐盖视觉检测与定位方法,其特征在于,所述位姿解算步骤包括: 二维坐标解算步骤:根据已经标定的机械臂与相机的位姿关系,通过图像坐标系下罐盖中心的坐标解算出在世界坐标系下罐盖中心的平面二维坐标; 三维坐标解算步骤:通过记录的相机距离地面的高度信息,利用图像中罐盖尺度的变化,得到罐盖中心在世界坐标系下的高度坐标,将高度坐标与通过位姿关系解算得到的平面二维坐标融合,得到罐盖中心在世界坐标系下的三维坐标。
6.一种罐盖视觉检测与定位系统,其特征在于,包括: 目标识别模块:针对罐盖图像进行模板匹配,获取感兴趣区域; 初步定位模块:对于获取到的感兴趣区域进行轮廓匹配正六边形模板,缩小检测区域; 精确定位模块:根据罐盖中心的灰度特性进行阈值分割,提取中心孔作为罐盖中心; 位姿解算模块:根据标定的位姿关系解算出罐盖中心在世界坐标系下的二维坐标,并将其与高度传感器得到的数据融合,得到罐盖中心在世界坐标系下的三维坐标。
7.根据权利要求6所述的罐盖视觉检测与定位系统,其特征在于, 所述目标识别模板包括模板存储模块和模板匹配模块,所述模板存储模块在作业区域内,拍摄多张不同光照情况下罐盖图像存储作为模板;所述模板匹配模块将存储的模板在待检测图像内遍历,依次按照顺序进行比较,选择匹配度最高的区域作为感兴趣区域; 所述初步定位模块包括图像预处理模块、提取轮廓模块、轮廓筛选模块和轮廓匹配模块,所述图像预处理模块对感兴趣区域进行高斯滤波去除噪声,选择合适的阈值对感兴趣区域进行二值化;所述提取轮廓模块使用Canny边缘检测算子在感兴趣区域内进行轮廓的提取;所述轮廓筛选模块根据罐盖在图像中的尺寸,设置轮廓长度和面积最小值,去除产生干扰的轮廓;所述轮廓匹配模块利用事先存储的轮廓匹配模板对每个轮廓进行匹配,选择匹配度最高的轮廓,提取罐盖中心金属板的特定轮廓。

8.根据权利要求6所述的罐盖视觉检测与定位系统,其特征在于, 所述精确定位模块包括划定检测区域模块、阈值分割步骤模块和中心孔拟合模块,所述划定检测区域模块以提取到的特定轮廓中心为圆心,提取周围200*200像素的区域,缩小检测区域;所述阈值分割模块利用罐盖中心孔的灰度特性,设置阈值,对新的检测区域进行阈值分割,得到罐盖中心孔的轮廓;所述中心孔拟合模块对得到的中心孔轮廓进行最小外接圆拟合,并提取外接圆形的中心作为罐盖中心; 所述位姿解算模块包括三维坐标解算模块和三维坐标解算模块,所述二维坐标解算模块根据已经标定的机械臂与相机的位姿关系,通过图像坐标系下罐盖中心的坐标解算出在世界坐标系下罐盖中心的平面二维坐标;所述三维坐标解算模块通过记录的相机距离地面的高度信息,利用图像中罐盖尺度的变化,得到罐盖中心在世界坐标系下的高度坐标,将高度坐标与通过位姿关系解算得到的平面二维坐标融合,得到罐盖中心在世界坐标系下的三维坐标。
9.某种存储有计算机程序的计算机可读存储介质,其特征在于,所述计算机程序被处理器执行时实现权利要求1至5中任一项所述的方法的步骤。
10.某种罐盖视觉检测与定位装置,其特征在于,包括权利要求6所述的罐盖视觉检测与定位系统或者权利要求7所述的存储有计算机程序的计算机可读存储介质。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























