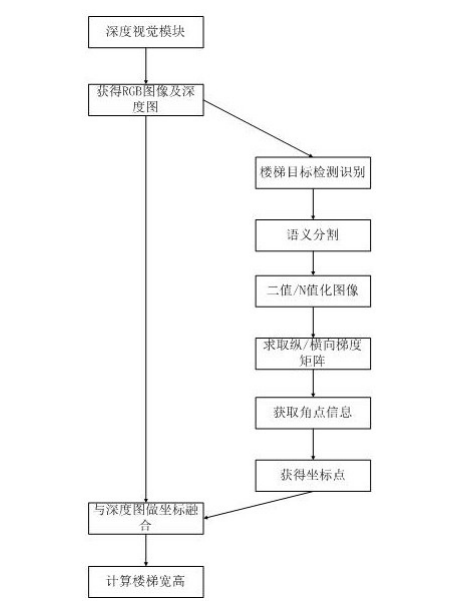
本发明涉及某种楼梯高度宽度视觉检测方法、装置及机器狗,该方法包括以下步骤:S1,采集楼梯图像信息,获得RGB图像和深度图;S2,对RGB图像进行语义分割,得到语义分割图像;S3,计算语义分割图像的横、纵向梯度矩阵;S4,利用梯度信息提取边角点像素坐标;S5,将边角点像素坐标对应到深度图中,计算出楼梯高度与宽度。本发明通过深度信息,计算出视差;通过语义分割得到楼梯边界,通过梯度计算定位处长、宽的边角坐标,继而计算出楼梯的高、宽,为机器狗上楼梯提供视觉辅助,避免机器狗踏在楼梯边缘或者是两级楼梯交界处,利于保证机器狗工作时的稳定。
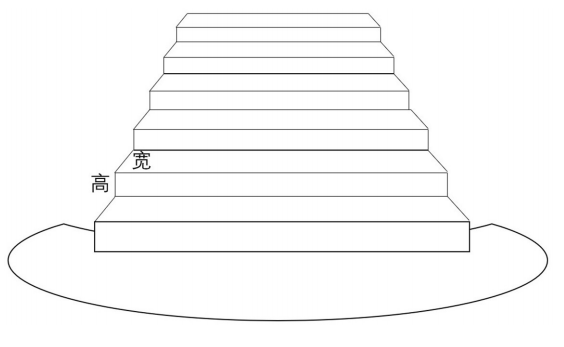
1.某种楼梯高度宽度视觉检测方法,其特征在于:包括以下步骤: S1,采集楼梯图像信息,获得RGB图像和深度图; S2,对RGB图像进行语义分割,得到语义分割图像; S3,计算语义分割图像的横、纵向梯度矩阵; S4,利用梯度信息提取边角点像素坐标; S5,将边角点像素坐标对应到深度图中,计算出楼梯高度与宽度。
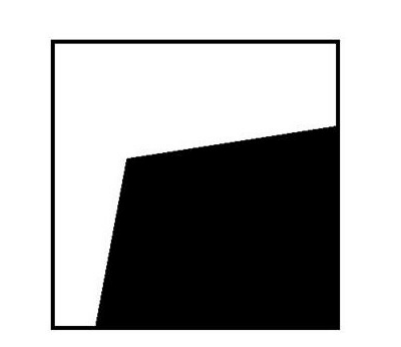
2.根据权利要求1所述的某种楼梯高度宽度视觉检测方法,其特征在于:通过对RGB图像进行语义分割,生成二值图像。

3.根据权利要求1所述的楼梯高度宽度视觉检测方法,其特征在于:在采集楼梯图像信息前,先进行目标检测识别,调整相机的位姿,使楼梯边缘填满整个镜头。
4.根据权利要求1所述的楼梯高度宽度视觉检测方法,其特征在于:所述S3中,采用公式(1)计算横向梯度矩阵: (1) 采用公式(2)计算纵向梯度矩阵: (2) 其中, 是像素矩阵上某个点的横、纵坐标, 是图像在该点处的像素值。
5.根据权利要求4所述的楼梯高度宽度视觉检测方法,其特征在于:设 是梯度矩阵, m是矩阵的行数, n是矩阵的列数;设常数 代表步长;则在 中有且仅有一个偏序序列 : ; ; 其中, 表示矩阵 中的第1行 列元、第2行 列元,……,第 m行 列元; 表示矩阵 中第 a行 b列元; , 都称为 的一个分量; 设集合 , 表示正整数集合;则 存在一个子序列 , ; 的每一个分量都在 中对应一个点,定义 中任意相邻的两个分量 , 为一个线段;其中 ,且( ; 所述S4具体为:在梯度矩阵上每 个纵向像素计算一次累计横向梯度,或者在梯度矩阵上每 个横向像素计算一次累计纵向梯度; 采用公式(3)计算累积横向梯度: (3) 采用公式(4)计算累积纵向梯度: (4) 其中, 指像素矩阵对应的纵向梯度矩阵, 指像素矩阵对应的横向梯度矩阵; 随后,将累积横向梯度或累积纵向梯度与判决常数进行比较,若大于判决常数,则认为所述线段属于台阶高的一部分;若小于判决常数,则认为所述线段属于台阶宽的一部分; 重复累积横向梯度或累积纵向梯度的计算,得到相对准确的楼梯高、宽的边的起始点坐标,根据矩阵的索引倒推出对应的像素点。

6.根据权利要求5所述的楼梯高度宽度视觉检测方法,其特征在于:所述的判决常数取1。
7.某种楼梯高度视觉检测装置,其特征在于:包括图像采集模块、语义分割模块、深度测量模块、梯度计算模块和楼梯高宽计算模块; 图像采集模块:用于采集楼梯图像信息; 语义分割模块:用于对图像进行语义分割,得到楼梯的边界; 深度测量模块:用于获取图像的深度信息,得到深度图; 梯度计算模块:根据语义分割图像计算出梯度信息,并根据梯度信息提取边角点像素坐标; 楼梯高宽计算模块:将边角点像素坐标映射到深度图中,计算出楼梯高度与宽度。
8.根据权利要求7所述的楼梯高度视觉检测装置,其特征在于:还包括目标检测模块:用于根据采集的楼梯图像信息进行相机位姿检测。
9.某种机器狗,其特征在于:包括权利要求7或8中任一项所述的楼梯高度视觉检测装置。
10.根据权利要求9所述的机器狗,其特征在于:包括双目深度摄像机模块。

文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























