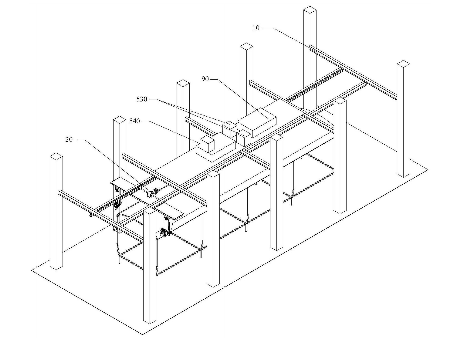
本实用新型公开了某种客车大顶蒙皮自动焊接系统,包括机架、焊接组件、检测装置、控制装置、以及与控制装置相连的第一驱动装置、第二驱动装置和第三驱动装置,控制装置控制第一驱动装置、第二驱动装置以及第三驱动装置运行,其中第一驱动装置可驱动焊接组件沿客车车身长度方向运动,第二驱动装置可驱动焊接组件沿客车车身宽度方向运动,第三驱动装置可驱动焊接组件沿客车车身高度方向运动,检测装置可检测出蒙皮的待焊接位置,检测装置将检测的待焊接位置信号传送给控制装置以控制焊接组件对待焊接位置进行自动化焊接。本实用新型的客车大顶蒙皮自动焊接系统可对待焊接位置进行自动化焊接,具有自动化焊接程度高、降低劳动强度的特点。
1.某种客车大顶蒙皮自动焊接系统,其特征在于,包括机架、焊接组件、检测装置、控制装置、以及与控制装置相连的第一驱动装置、第二驱动装置和第三驱动装置,控制装置控制第一驱动装置、第二驱动装置以及第三驱动装置运行,其中第一驱动装置可驱动焊接组件沿客车车身长度方向运动,第二驱动装置可驱动焊接组件沿客车车身宽度方向运动,第三驱动装置可驱动焊接组件沿客车车身高度方向运动,检测装置可检测出大顶蒙皮的待焊接位置,检测装置将检测的待焊接位置信号传送给控制装置以控制焊接组件对待焊接位置进行自动化焊接。
2.根据权利要求1所述的客车大顶蒙皮自动焊接系统,其特征在于,所述待焊接位置为客车大顶蒙皮与车身的接合位置。
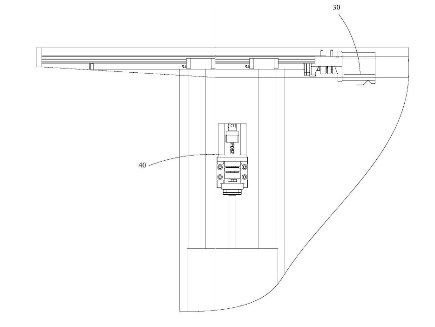
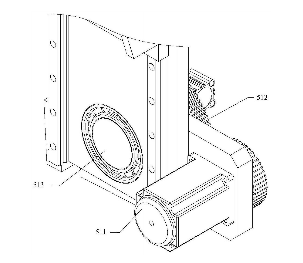
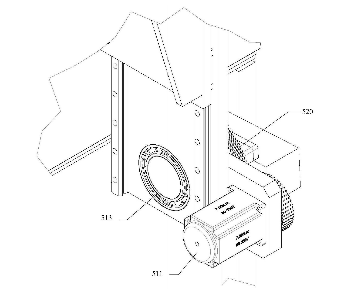
3.根据权利要求1所述的客车大顶蒙皮自动焊接系统,其特征在于,所述焊接组件与焊接支架连接,焊接支架与机架活动连接,第一驱动装置驱动焊接支架沿机架移动从而带动焊接组件移动,第二驱动装置、第三驱动装置设置在焊接支架上,第二驱动装置和第三驱动装置通过驱动焊接支架或焊接支架的一部分移动从而带动焊接组件移动。
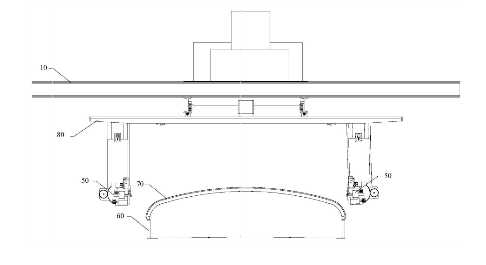
4.根据权利要求1所述的客车大顶蒙皮自动焊接系统,其特征在于,所述检测装置包括第一检测组件和第二检测组件,第一检测组件包括第一定位块、第一定位块驱动件以及第一位置传感器,第一定位块驱动件可驱动第一定位块移动抵靠在大顶蒙皮外侧壁上第二检测组件包括第二定位块、第二定位块驱动件以及第二位置传感器,第二定位块驱动件可驱动第二定位块移动并使第二定位块的顶部抵靠在大顶蒙皮的底部,第一位置传感器检测第一定位块抵靠大顶蒙皮外侧壁时的第一定位参数,第二位置传感器检测第二定位块抵靠大顶蒙皮底部时的第二定位参数,控制装置根据第一定位参数和第二定位参数控制驱动第二驱动装置和第三驱动装置运行以使焊接头的焊接方向对准待焊接位置。

5.根据权利要求1所述的客车大顶蒙皮自动焊接系统,其特征在于,所述焊接组件包括多个,客车大顶蒙皮与车身的接合位置位于车身的两侧,客车车身设置在机架的下方,多个焊接组件分别成组对应设置在车身的两侧。
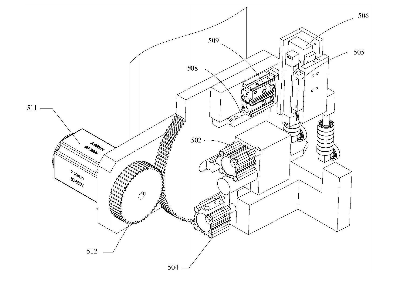
6.根据权利要求1所述的客车大顶蒙皮自动焊接系统,其特征在于,所述焊接组件包括焊接头、地线以及焊接组件驱动件,焊接组件驱动件包括焊接头驱动件和地线驱动件,地线驱动件和焊接头驱动件分别驱动地线和焊接头移动以对待焊接位置进行焊接,或者所述焊接组件为激光焊接器,激光焊接器具有焊接头。
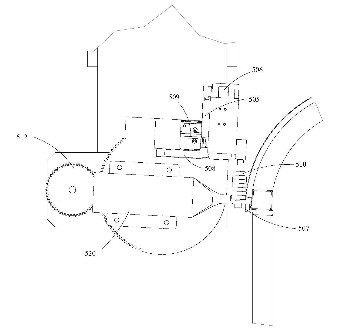
7.根据权利要求6所述的客车大顶蒙皮自动焊接系统,其特征在于,所述焊接组件还包括对焊接头的焊接角度进行调整的角度调整装置,所述角度调整装置可驱动焊接组件旋转以改变焊接头与大顶蒙皮立面的夹角,从而使焊接头的焊接角度与车身大顶蒙皮的底边缘外形匹配。
8.根据权利要求7所述的客车大顶蒙皮自动焊接系统,其特征在于,所述角度调整装置包括第四驱动装置和传动装置,所述传动装置为传动齿轮组,所述检测装置、焊接组件均设置在连接支架上,连接支架与焊接支架活动连接,第四驱动装置通过驱动连接支架转动,从而带动检测装置、焊接组件同步转动。
9.根据权利要求8所述的客车大顶蒙皮自动焊接系统,其特征在于,所述第一驱动装置、第二驱动装置、第三驱动装置和第四驱动装置为数控驱动装置。
10.根据权利要求8所述的客车大顶蒙皮自动焊接系统,其特征在于,所述第一驱动装置、第二驱动装置、第三驱动装置、第四驱动装置、焊接组件驱动件以及检测装置均与控制装置相连与第一驱动装置、第二驱动装置、第三驱动装置、第四驱动装置、焊接组件驱动件以及检测装置相连的控制装置为集成的同一个控制装置或为不同的多个单独控制装置。