摘要:
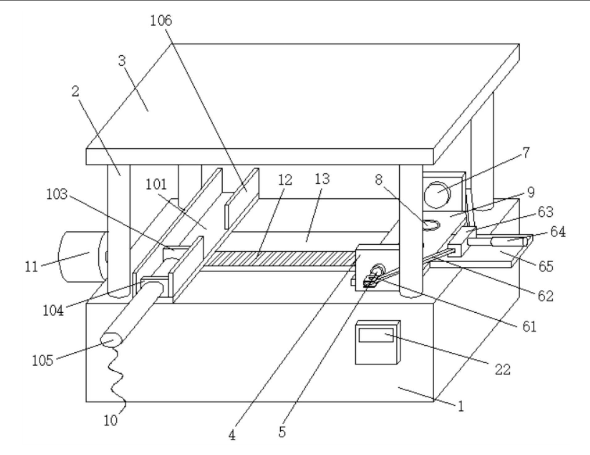
本发明公开了一种视觉整形定位自动化设备,属于整形加工装置领域,包括壳体、支柱和顶板,壳体的上表面的四角处均通过支柱与顶板的下表面固定连接,壳体的上表面贴合有第一底板,第一底板的正面和背面均固定连接有锁定板,两个锁定板的相对面均卡接有滑套,滑套内套设有滑杆,两个滑杆的相对端均固定连接有夹板。
背景技术:
视觉整形加工是对工件进行定位加工,在工件上开槽或对工件进行切削,通过改变工件的效果达到视觉整形功能。视觉整形定位自动化设备。该方案中记载了“在对整形工件实现三维自动定位的基础上简化了结构,减少了空间占用,提高了空间利用率,自动定位过程简洁,操作简单,使用方便,提高了工作效率,同时通过工件固定机构可以在加工过程中固定好工件,防止工件因位移而影响加工精度,提高了加工质量”和“四个第一电动推杆通过第一推板将加工件从四个水平方向定位到工作面上,通过测距机构检测加工件的位置,可以实现精确定位,提高加工精度”。
发明内容:
为了克服现有技术的缺陷,本发明所要解决的技术问题在于提出一种视觉整形定位自动化设备,能够快速对工件进行定位,且通过双重定位手段定位效果更好,同时利用较少的驱动机构即可带动工件移动方便工件被调节位置并被加工,最后能够对工件的加工数量自动计数,并可以将工件自动送下工作台使用方便。
为达此目的,本发明采用以下技术方案:
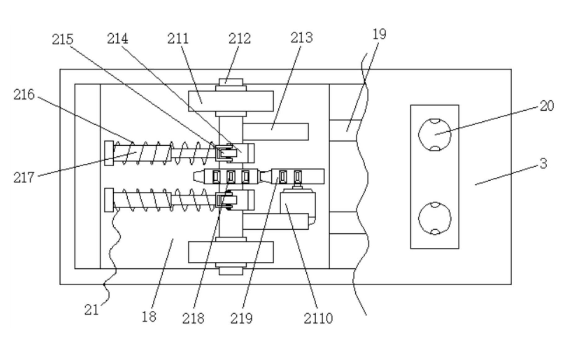
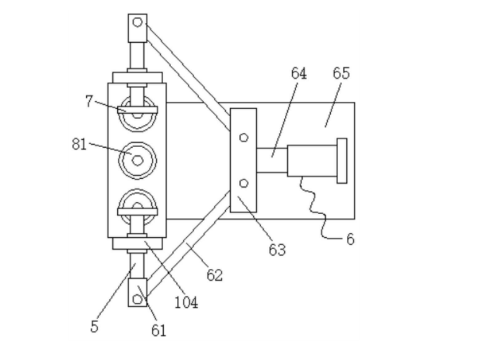
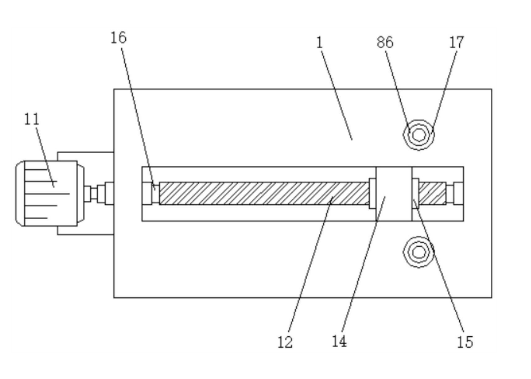
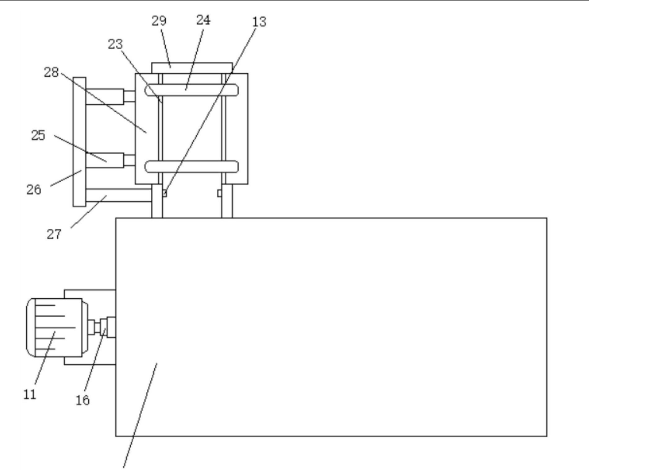
本发明提供了一种视觉整形定位自动化设备滑杆的另一端固定连接有驱动机构,驱动机构固定连接在第一底板的右侧面,第一底板上设置有吸附机构,吸附机构的下表面固定连接有滑块,滑块滑动连接在壳体上表面开设的滑槽内,滑块的左侧面卡接有螺纹帽,螺纹帽内螺纹连接有螺纹柱,螺纹柱的左右两端均固定连接有第一转轴,第一转轴的外表面套设有第一轴承,两个第一轴承分别卡接在滑槽内壁的左右两侧面,第一转轴的左端贯穿壳体左侧面并与第一电机的输出轴固定连接导向机构包括固定连接在壳体上表面的第二底板,第二底板上表面的左右两侧均固定连接有侧板,右侧侧板的右侧面设置有第二缺口,第二底板的上表面固定连接有固定板,固定板的正面卡接有第二电动推杆,第二电动推杆背面的一端固定连接有第一推板,第一推板的背面固定连接有薄板,薄板贴合在右侧侧板的一侧面。
收集盒的左右两侧面均开设有第一缺口,第一缺口内设置有第三推板,两个第三推板的上表面通过两个定位杆固定连接。第三推板左侧面的前后两侧均固定连接有第四电动推杆,第四电动推杆的左端与连接板的右侧面固定连接,连接板的右侧面通过安装杆与收集盒的左侧面。收集盒内壁的左右两侧面均设置有红外扫描器,红外扫描器的输出端与控制器的输入端电性连接,控制器固定安装在壳体的正面,控制器的输出端与第四电动推杆的输入端电性连接。
本发明的有益效果为:
1、通过设置驱动机构、滑杆和夹板,驱动机构工作能够带动滑杆移动,滑杆可以调节夹板的位置,能够让两个夹板相互靠近或相互远离,从而能够稳定的固定住工件或松开工件,通过设置吸附机构。利用吸附机构中的吸盘可以对工件的下表面进行吸附,吸盘与工件之间为负压状态时,能够稳定的吸附住工件的下表面,因此夹板和吸盘能够对工件进行双重固定,不需要拧动螺栓进行固定,且操作更加方便,同时对工件的固定效果更好。
2、通过设置第一电机、螺纹柱、螺纹帽和滑块,在其配合作用下,第一电机工作时能够带动第一底板左右移动,因此第一底板能够带动工件左右移动,让工件的不同部位移动至整形机的下侧,方便对工件进行加工,通过设置位置调节机构和导向机构,利用位置调节机构可以对工件的位置进行调节,将工件导入至导向机构内,随后导向机构将工件向后导入,让工件离开壳体上侧,实现工件自动被送下加工台,不需要工人手动取出,极大的方便了工人的操作。
3、通过设置收集盒、红外扫描器和控制器,收集盒可以收集多个工件,利用红外扫描器可以对收集盒内的工件进行扫描,如果红外扫描器扫描到工件的时间超过五秒,说明收集盒内的工件放置已满,通过设置第四电动推杆和第三推板,第四电动推杆工作时能够带动第三推板移动,第三推板移动时可以将收集盒内的工件通过右侧第一缺口推出收集盒,实现对工件的收集,且收集盒内放置工件的数量为固定的,因此控制器控制第四电动推杆工作的次数可以被记录,工人可以根据第四电动推杆工作的次数测得工件的数量,不需要工人手动记录,极大的降低了出错的概率。





























