本实用新型涉及自动化设备技术领域,特别涉及一种全自动化机械抓手。
背景技术:
机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件或工具的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动、摆动、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势,运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数,自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。

技术实现要素:
本实用新型的目的在于解决上述不足,提供一种全自动化机械抓手,具有设计合理、操控简单、灵活性强、自动化程度高及通用性强等特点。
本实用新型所解决的技术问题可以采用以下技术方案来实现:
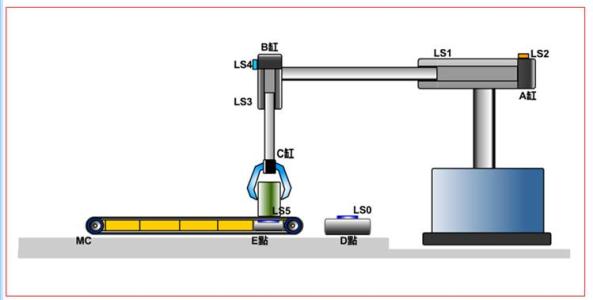
一种全自动化机械抓手,包括机身、大臂、小臂和手部,所述机身底部设有基座关节,所述基座关节内设有第一步进电机用于控制机身转动,所述机身与所述大臂之间设有肩关节,所述肩关节内设有第二步进电机用于控制大臂转动,所述大臂与所述小臂之间设有肘关节,所述肘关节内设有第三步进电机用于控制小臂转动,所述小臂与所述手部之间设有一腕部,所述腕部由腕摆动关节、臂旋转关节及腕弯曲关节构成,所述小臂后端设有第四步进电机用于控制小臂旋转,所述小臂内设有第五步进电机用于控制所述腕摆动关节摆动,所述小臂内还设有第六步进电机用于控制所述腕弯曲关节转动,所述小臂由16Mn钢板材料折弯成矩形截面的方形管制成,所述小臂臂壳厚度尺寸为2.2mm,还包括一PLC控制装置,所述PLC控制装置由一台控制终端、一个主单片机及六个从单片机构成,六个所述从单片机分别与第一步进电机、第二步进电机、第三步进电机、第四步进电机、第五步进电机及第六步进电机电连接,所述主单片机与六个所述从单片机互通连接,所述控制终端与所述主单片机互通连接。
所述第四步进电机与小臂之间依次连接设有联轴器和向心推力球轴承。
还包括一腕摆框,所述腕摆框与所述第五步进电机之间通过第一同步带连接,所述腕摆框与所述腕摆动关节连接安装。
还包括一锥齿轮副,所述锥齿轮副与所述第六步进电机之间通过第二同步带连接,所述锥齿轮副与所述腕弯曲关节连接安装。
所述手部由手抓端及手部接口端构成,所述手部接口端与所述腕部对应安装。
所述控制终端为PC电脑、智能手机或平板电脑。
本实用新型与现有技术相比具有如下突出优点和效果:本实用新型通过优化机械手关节部件,使其具备六个关节动作和一个抓手动作,优化腕部设计,使其具有3个自由度,提高了整体的灵活性,可以实现臂转、腕摆及手转的动作,采用PLC控制装置控制关节型机械手,利用三级分布式控制方式,可以完成机电一体化自动化生产,提高整体的控制性能和灵活性,具有设计合理、操控简单、灵活性强、自动化程度高及通用性强等特点。
技术特征:1.一种全自动化机械抓手,包括机身、大臂、小臂和手部,其特征在于:所述机身底部设有基座关节,所述基座关节内设有第一步进电机用于控制机身转动,所述机身与所述大臂之间设有肩关节,所述肩关节内设有第二步进电机用于控制大臂转动,所述大臂与所述小臂之间设有肘关节,所述肘关节内设有第三步进电机用于控制小臂转动,所述小臂与所述手部之间设有一腕部,所述腕部由腕摆动关节、臂旋转关节及腕弯曲关节构成,所述小臂后端设有第四步进电机用于控制小臂旋转,所述小臂内设有第五步进电机用于控制所述腕摆动关节摆动,所述小臂内还设有第六步进电机用于控制所述腕弯曲关节转动,所述小臂由16Mn钢板材料折弯成矩形截面的方形管制成,所述小臂臂壳厚度尺寸为2.2mm,还包括一PLC控制装置,所述PLC控制装置由一台控制终端、一个主单片机及六个从单片机构成,六个所述从单片机分别与第一步进电机、第二步进电机、第三步进电机、第四步进电机、第五步进电机及第六步进电机电连接,所述主单片机与六个所述从单片机互通连接,所述控制终端与所述主单片机互通连接。
2.根据权利要求1所述的一种全自动化机械抓手,其特征在于:所述第四步进电机与小臂之间依次连接设有联轴器和向心推力球轴承。
3.根据权利要求1所述的一种全自动化机械抓手,其特征在于:还包括一腕摆框,所述腕摆框与所述第五步进电机之间通过第一同步带连接,所述腕摆框与所述腕摆动关节连接安装。
4.根据权利要求1所述的一种全自动化机械抓手,其特征在于:还包括一锥齿轮副,所述锥齿轮副与所述第六步进电机之间通过第二同步带连接,所述锥齿轮副与所述腕弯曲关节连接安装。
5.根据权利要求1所述的一种全自动化机械抓手,其特征在于:所述手部由手抓端及手部接口端构成,所述手部接口端与所述腕部对应安装。
6.根据权利要求1所述的一种全自动化机械抓手,其特征在于:所述控制终端为PC电脑、智能手机或平板电脑。

技术总结
本实用新型公开了一种全自动化机械抓手,包括机身、大臂、小臂和手部,机身底部设有基座关节,基座关节内设有第一步进电机,机身与大臂之间设有肩关节,肩关节内设有第二步进电机,大臂与小臂之间设有肘关节,肘关节内设有第三步进电机,小臂与手部之间设有一腕部,腕部由腕摆动关节、臂旋转关节及腕弯曲关节构成,小臂后端设有第四步进电机,小臂内设有第五步进电机,小臂内还设有第六步进电机,还包括一PLC控制装置,PLC控制装置由一台控制终端、一个主单片机及六个从单片机构成。本实用新型可以完成机电一体化自动化生产,提高整体的控制性能和灵活性,具有设计合理、操控简单、灵活性强、自动化程度高及通用性强等特点。

技术研发人员:姚有峰;李泽彬;朱雪梅;计甜甜;孙朋;朱顺;杨伟国;类朝鹏;吴京安
受保护的技术使用者:皖西学院
文档号码:201620729939
技术研发日:2016.07.01
技术公布日:2017.01.11





























