摘要:
本发明公开了一种自动化建筑机器人及其使用方法,机器人包括机架、升降模块、拾取模块和供料模块,其中所述机架是其他各结构的支撑部分,升降模块用于根据物料的层叠高度调整拾取模块的高度,拾取模块用于对物料的拾取,供料模块用于物料的提供。本发明的自动化建筑机器人解决了板材安装室内装修机器人系统的板材自动供料问题,从而使板材安装室内装修的自动化水平大大提高。板材自动供料系统是供料机械中典型的机电一体化产品,对其进行研究不仅具有很高的应用价值,同时还有很高的理论价值。

技术领域:
本发明属于建筑建造领域,具体涉及一种自动化建筑机器人,特别是一种板材安装供料机器人。
背景技术:
从20世纪40年代至今,全球范围的科技革命促进了生产和生活方式的重大变化,机器人的诞生和机器人学的建立,无疑是世纪人类科学技术的重大成就。机器人作为一种高技术,也是不断发展和完善的,这种不断的发展和完善是通过科技革命的内在推动力来实现的。同时机器人的发展和广泛应用,使科学技术成为显见的生产力,极大地推动着科学技术的发展,推动着人民生活的改善,推动着生产力的提高,推动着整个社会的进步。机器人技术作为当今科学技术发展的前沿学科,将成为未来社会生产和生活中不可缺少的角色。
工业机器人技术是当今世界最引人注目的高新产品之一。许多国家都把发展机器人作为高技术领域的战略目标列入国家发展计划,但各国的发展模式有所不同。进入2010年代以来,由于具有一般功能的传统工业机器人的应用趋向饱和,而许多高级生产和特种应用则需要具有各种智能的机器人参与,因而促使智能机器人获得较为迅速的发展。无论从国际或国内的角度来看,复苏和继续发展机器人产业的一条重要途径就是开发各种智能机器人,以求提高机器人的性能,扩大其功能和应用领域,这正是本领域急需解决的技术问题。
发明内容:
为了达到上述目的,本申请提供如下技术方案:
升降模块包括升降机构、第一电机、提升梁、吊耳、安装环和第二电机。升降模块包括两个升降机构,两个升降机构分别安装于系统两侧,且两个升降机构中间由提升梁连接,升降机构包括丝杠、维持杠、支撑架,丝杠通过第一电机驱动,每一丝杠两侧各设置有一维持杠,丝杠上转动连接有支撑架,且两个维持杠也均穿过支撑架,提升梁两端分别连接于两升降机构的支撑架上。提升梁底部设置有两个吊耳,且每一吊耳底部设置有安装环,用于将拾取模块吊设于提升梁底部,提升梁底部两吊耳之间的位置处横置有第二电机。
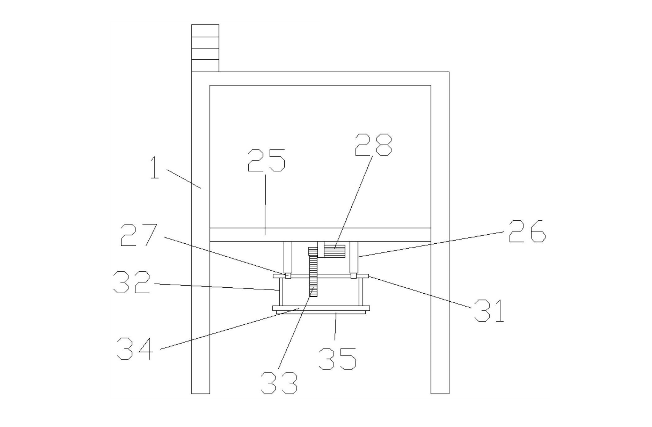
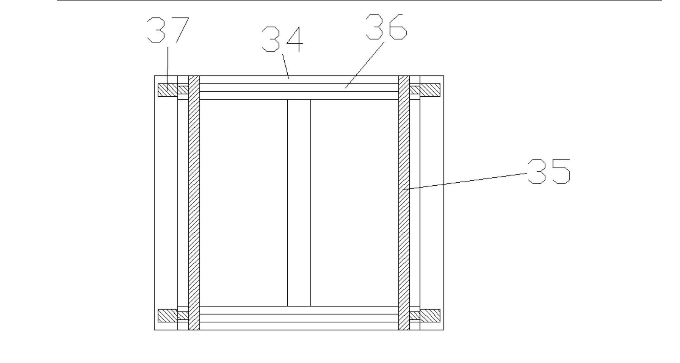
拾取模块包括回转梁、抓梁、回转轮、支架、拾取爪、轨道、气缸。支架为方形框架,方形框架包括前、后梁和左、右梁,支架的左、右梁上表面分别垂直设置有抓梁,两抓梁顶端连接设置有回转梁,回转梁中间位置设置有回转轮。支架前、后梁底面上分别设置有轨道,轨道内咬合有拾取爪所述拾取爪有两个,分别位于支架的左右两侧所述拾取爪能够沿轨道运动,支架的四个角上分别设置有与拾取爪连接的气缸,气缸分别能够驱动两拾取爪沿轨道接近或远离。供料模块为一个小车下部由万向轮支撑,以实现小车的移动,供料模块上表面设置有两排定位孔,定位孔内安装有定位杆,不同长度的板材可以将定位杆安装于不同的定位孔内。
有益效果:
本发明中的建筑机器人具有好的使用性能指标,操作使用方便、工作安全可靠、体积小、重量轻、效率高、外形美观、噪声低。
从机器经济性方面,本发明中的建筑机器人具有良好的机器经济性,具有合理的功能定位,利用最简单的技术途径和最简单合理的结构实现使用功能要求。本发明的自动化建筑机器人解决了板材安装室内装修机器人系统的板材自动供料问题,从而使板材安装室内装修的自动化水平大大提高。板材自动供料系统是供料机械中典型的机电一体化产品,对其进行研究不仅具有很高的应用价值,同时还有很高的理论价值。
本发明的自动化建筑机器人对板材供料系统采用机械电子学思想进行了总体设计。立足于机电一体化的观点,对板材供料系统的结构形式、驱动装置、传动方式等各组成部分进行了较为全面的分析,最后得出板材供料系统的总体方案。该方案结构简单、运行可靠,满足设计基本要求。在满足使用要求的前提下对各种电气元件选型进行了比较,做出经济合理的选择,争取在最大范围内降低成本,满足了设计的经济性要求。结合使用要求,工艺要求等对各种典型零件结构进行设计,使本供料系统做到了安装简单、运行可靠。





























