
 加客服免费发需求
加客服免费发需求
 联系客服咨询项目
联系客服咨询项目


本实用新型涉及一种机器人自动凸焊精确定位的装置,包括视觉系统、控制模块及机器人,机器人的抓手抓取被凸焊的螺母,视觉系统的输出端连接控制模块的输入端,控制模块的输出端连接机器人的输入端;所述视觉系统包括摄像头、标准图像、比对模块及数字处理模块,摄像头拍摄抓手抓取的螺母的图像形成拍摄图像,所述拍摄图像中孔的位置及标准图像中孔的位置通过比对模块比对后得到比对偏差信号,所述比对偏差信号经过数字处理模块处理后形成偏差数字信号,偏差数字信号传输至控制模块,所述控制模块将偏差数字信号发送至机器人,所述机器人根据偏差数字信号控制凸焊焊枪的焊接位置。
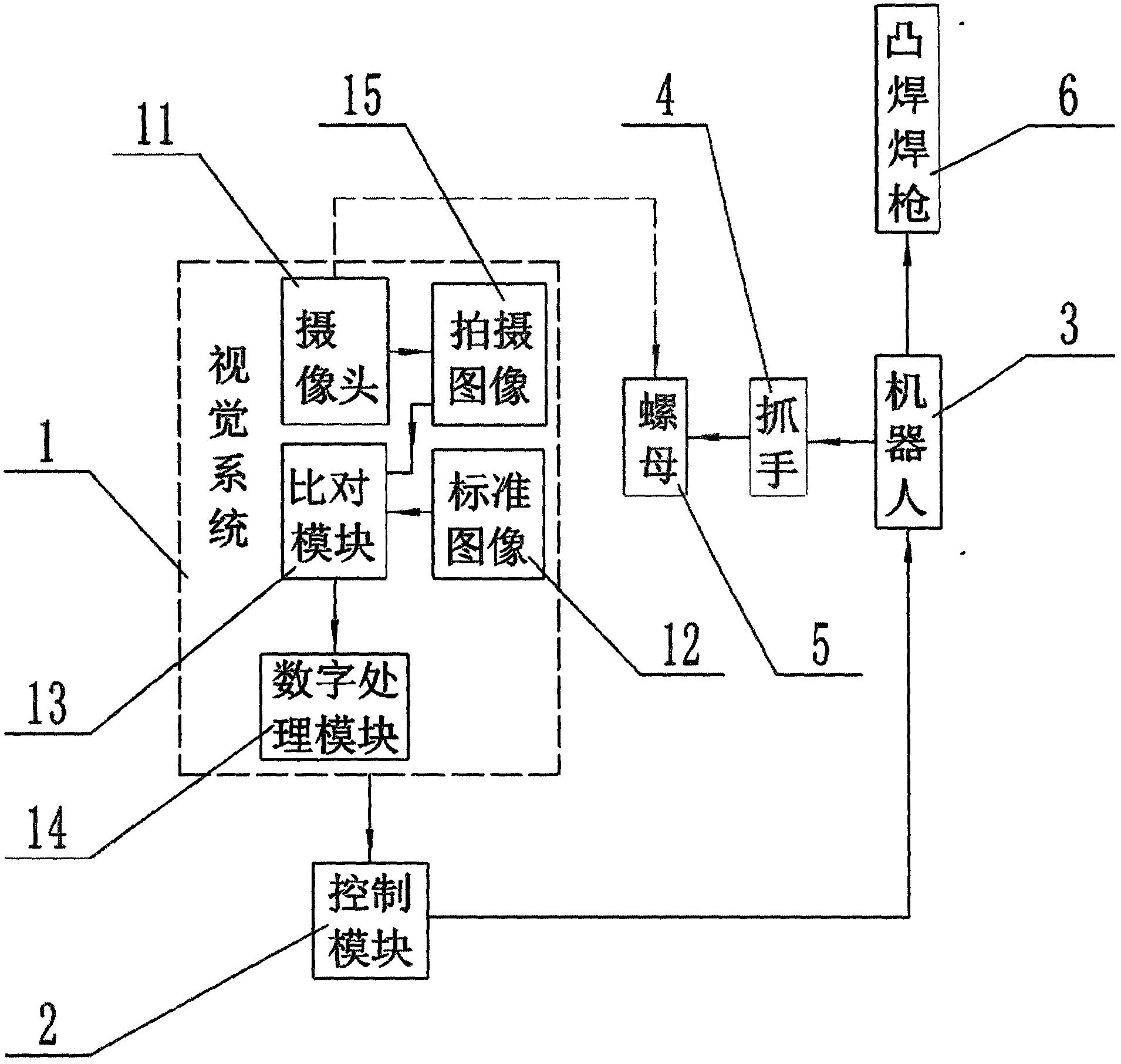
主权利要求: 1.一种机器人自动凸焊精确定位的装置,其特征在于:包括视觉系统(1)、控制模块(2)及机器人(3),机器人(3)的抓手(4)抓取被凸焊的螺母(5),视觉系统(1)的输出端连接控制模块(2)的输入端,控制模块(2)的输出端连接机器人(3)的输入端;所述视觉系统(1)包括摄像头(11)、标准图像(12)、比对模块(13)及数字处理模块(14),摄像头(11)拍摄抓手(4)抓取的螺母(5)的图像形成拍摄图像(15),所述拍摄图像(15)中孔的位置及标准图像(12)中孔的位置通过比对模块(13)比对后得到比对偏差信号,所述比对偏差信号经过数字处理模块(14)处理后形成偏差数字信号,偏差数字信号传输至控制模块(2),所述控制模块(2)将偏差数字信号发送至机器人(3),所述机器人(3)根据偏差数字信号控制凸焊焊枪(6)的焊接位置。






















