本发明公开了某种可高精度自定位焊接位置的传感器引脚焊接设备,涉及电设备结构零部件的焊接技术领域,包括操作底座,操作底座的表面固定连接有支撑柱,支撑柱的上端固定连接有操作箱,操作底座的表面开设有开口,操作底座通过开口定轴转动连接有焊接平台,焊接平台的表面设置有对传感器进行限位的夹持部件。本发明,通过上述结构之间的相互配合,具备了使用快捷方便,自动化程度高,保证了焊接精度的前提下大大提高了焊接效率,且减小了操作人员劳动强度的效果,解决了传统的焊接装置进行使用时,传感器待焊部位与焊接头的位置往往无法精确定位,导致了焊接效果不理想,且无法保证良好焊接效率的问题。
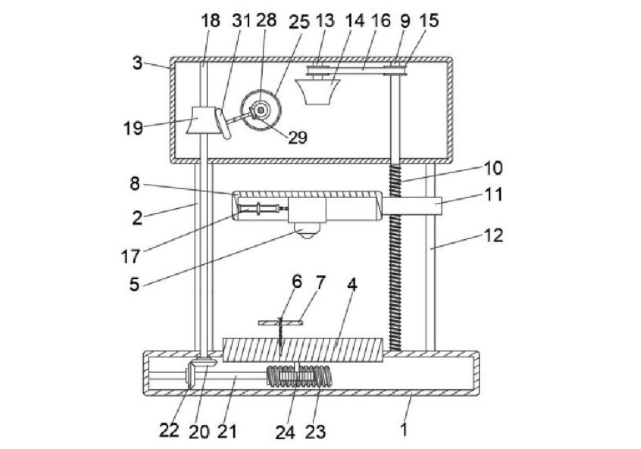
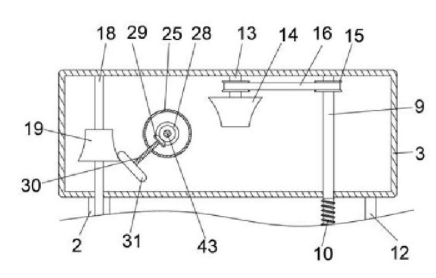
1.某种可高精度自定位焊接位置的传感器引脚焊接设备,包括操作底座(1),其特征在于:所述操作底座(1)的表面固定连接有支撑柱(2),所述支撑柱(2)的上端固定连接有操作箱(3),所述操作底座(1)的表面开设有开口,所述操作底座(1)通过开口定轴转动连接有焊接平台(4); 所述焊接平台(4)的表面设置有对传感器进行限位的夹持部件,还包括对传感器引脚进行焊接的焊接头(5),以及驱动所述焊接头(5)进行垂直上下移动,且移动速度可控的第一驱动部件,还包括驱动所述焊接平台(4)进行转动且可精确控制转速的第二驱动部件; 所述第一驱动部件包括移动顶盖(8),所述操作箱(3)内壁的顶部定轴转动连接有转轴一(9),所述操作箱(3)的底部开设有供所述转轴一(9)穿出且与之活动套接的通孔,所述转轴一(9)的底面固定连接有螺纹杆(10),所述螺纹杆(10)的底面与所述操作底座(1)的表面定轴转动连接,所述螺纹杆(10)的表面螺纹连接有螺纹套(11),所述螺纹套(11)的表面与所述移动顶盖(8)的侧面固定连接,所述操作底座(1)与所述操作箱(3)的相对侧共同固定连接有滑柱(12),所述螺纹套(11)滑动套接在所述滑柱(12)的表面,所述操作箱(3)的内壁定轴转动连接有转轴二(13),所述转轴二(13)的底面固定连接有锥形轮一(14),所述转轴二(13)与所述转轴一(9)的轴臂均固定连接有皮带轮(15),两个所述皮带轮(15)的表面共同设置有皮带(16),还包括驱动所述焊接头(5)进行横向移动的横向调节部件; 所述第二驱动部件包括定轴转动连接在所述操作箱(3)内壁的转轴三(18),所述转轴三(18)的表面固定套接有锥形轮二(19),所述操作箱(3)的底部与所述操作底座(1)的顶部均开设有供所述转轴三(18)穿过且与之定轴转动连接有通槽,所述转轴三(18)的底面固定连接有锥形齿轮一(20),所述操作底座(1)的内壁定轴转动连接有驱动轴(21),所述驱动轴(21)的表面固定套接有锥形齿轮二(22),所述锥形齿轮一(20)与所述锥形齿轮二(22)的表面相啮合,所述驱动轴(21)的端部固定连接有蜗杆(23),所述焊接平台(4)的底面固定连接有蜗轮(24),所述蜗杆(23)与所述蜗轮(24)的表面啮合,还包括驱动所述锥形轮二(19)与所述锥形轮一(14)进行速度可调式转动的旋转驱动部件; 所述旋转驱动部件包括盘体(25)和开关(27),所述盘体(25)定轴转动连接在所述操作箱(3)的内壁,所述盘体(25)的内壁固定连接有电机(26),所述电机(26)输出轴的表面固定连接有锥形齿轮三(28),所述锥形齿轮三(28)的表面啮合有锥形齿轮四(29),所述锥形齿轮四(29)的表面固定连接有转杆(30),所述盘体(25)的表面开设有供所述转杆(30)穿过且与之定轴转动连接的穿孔一,所述转杆(30)的端部固定连接有驱动轮(31),所述开关(27)与所述电机(26)电性连接,还包括驱动所述盘体(25)进行转动且随时限位的转动部件。
2.根据权利要求1所述的可高精度自定位焊接位置的传感器引脚焊接设备,其特征在于:所述夹持部件包括螺钉(6),所述螺钉(6)通过所述焊接平台(4)表面开设的螺纹孔与其螺纹连接,所述螺钉(6)的轴臂固定套接有夹持板(7)。
3.根据权利要求1所述的可高精度自定位焊接位置的传感器引脚焊接设备,其特征在于:所述横向调节部件为电动推杆(17),所述电动推杆(17)固定安装在所述移动顶盖(8)的内壁,所述电动推杆(17)伸缩部的表面与所述焊接头(5)的外壁固定连接。
4.根据权利要求1所述的可高精度自定位焊接位置的传感器引脚焊接设备,其特征在于:所述转动部件包括安装块(32),所述安装块(32)固定连接在所述操作箱(3)的背侧,所述安装块(32)的内壁滑动连接有转柱(33),所述转柱(33)的表面滑动套接有齿轮(34),所述齿轮(34)的表面与所述安装块(32)的内壁定轴转动连接,所述齿轮(34)的内部开设有限位槽一(35),所述限位槽一(35)的内壁滑动连接有限位块一(36),所述限位块一(36)固定连接在所述转柱(33)的表面,所述转柱(33)的表面开设有限位槽二(37),所述限位槽二(37)的内壁滑动连接有限位柱(38),所述操作箱(3)的表面开设有供所述限位柱(38)穿过且与之定轴转动连接的孔体,所述限位柱(38)的端部与所述盘体(25)的表面固定连接,所述转柱(33)的表面固定连接有L形杆(46),所述L形杆(46)的端部抵接有卡块(39),所述卡块(39)沿所述安装块(32)的内壁上下滑动,所述卡块(39)的表面与所述安装块(32)的内壁共同固定连接有弹簧一(40),所述卡块(39)的端部与所述齿轮(34)的表面啮合,所述转柱(33)与所述操作箱(3)的相对侧共同固定连接有弹簧二(41),所述弹簧二(41)活动套接在所述限位柱(38)的表面,所述转柱(33)的表面固定套接有旋钮(42),所述开关(27)固定安装在所述旋钮(42)的表面。
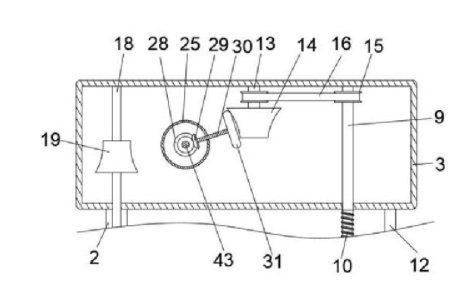
5.根据权利要求1所述的可高精度自定位焊接位置的传感器引脚焊接设备,其特征在于:所述锥形齿轮三(28)的表面固定连接有柱体(43),所述操作箱(3)的表面开设有供所述柱体(43)穿出且与之定轴转动连接的穿孔二,所述柱体(43)的端部固定连接有指针(44),所述操作箱(3)的表面固定连接有刻度盘(45)。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























