本发明公开了某种曲线状待测物视觉检测结果的显示方法,视觉检测设备固定在机器人上,与机器人末端同步匀速运动,视觉检测设备随之获取曲线状待测物对应位置的图像;总览图上均匀分布有多个显示框,显示框与对应位置的检测结果相关联;总览图上分布多个显示框是在测试前预先进行如下步骤获取的:1)获取曲线状待测物的总览图,人工标注首、尾两个端点,再沿曲线状待测物人工标注示意点,所有点记为第一类点;第一类点能反馈曲线状待测物的形状特征;2)在两个相邻的第一类点之间均匀插入第二类点;3)依据所有第一、第二类点的位置绘制显示框。该方法显示位置与视觉检测结果相对应,并能将检测结果在零件上的实际位置实时显示。
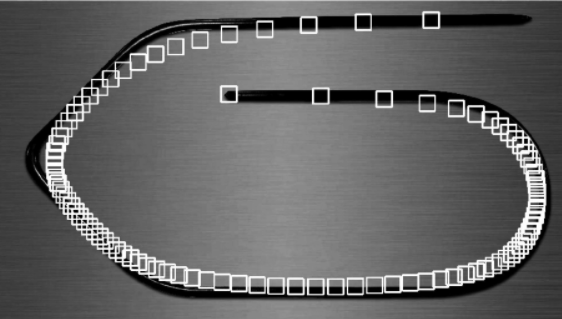
1.某种曲线状待测物视觉检测结果的显示方法,视觉检测设备固定在机器人上,与机器人末端同步运动,所述机器人末端匀速运动,视觉检测设备随之获取曲线状待测物对应位置的图像;其特征在于:所述曲线状待测物总览图上均匀分布有多个显示框,所述显示框与对应位置的检测结果相关联: 在所述曲线状待测物总览图上均匀分布多个显示框是在对具体某种零件检测时预先进行如下步骤而获取: 1)获取所述曲线状待测物的总览图,人工标注曲线待测物的首、尾两个端点,再沿曲线状待测物人工标注示意点,此步人工标注的所有点记为第一类点;所述第一类点能反馈曲线状待测物的形状特征; 2)在所述第一类点中两个相邻的点之间按照如下方法插入第二类点;相邻两第一类点之间第二类点的数量m为相邻两第一类点之间长度占所述曲线状待测物总长度的比例与视觉检测传感器总采图量的乘积 m个第二类点均匀的分布在相邻两第一类点之间; 直至所有相邻两第一类点之间均分布有第二类点; 3)依据所有第一类点和第二类点的位置在所述曲线状待测物上绘制显示框。
2.如权利要求1所述曲线状待测物视觉检测结果的显示方法,其特征在于:m个第二类点均匀的分布在相邻两第一类点的方法为:①将相邻两第一类点分别标记为点A、点B,点A的图像坐标为(x A,y A);点B的图像坐标为(x B,y B);点A和点B所在直线的斜率为k,在y方向的截距为b;②分别确定m个第二类点的坐标(x i,y i);x i=x A+it;y i=kx i+b; 其中,i取值为[1,m]中的自然数;t=(x B-x A)/m。
3.如权利要求1所述曲线状待测物视觉检测结果的显示方法,其特征在于:所述显示框的形状为矩形、椭圆、菱形、三角形、圆形、梯形或多边形。
4.如权利要求1所述曲线状待测物视觉检测结果的显示方法,其特征在于:被选中的显示框能显示为区别于其它显示框的形状、线性或者颜色。

5.如权利要求1所述曲线状待测物视觉检测结果的显示方法,其特征在于:所述显示框能依据对应位置的检测结果显示不同颜色。
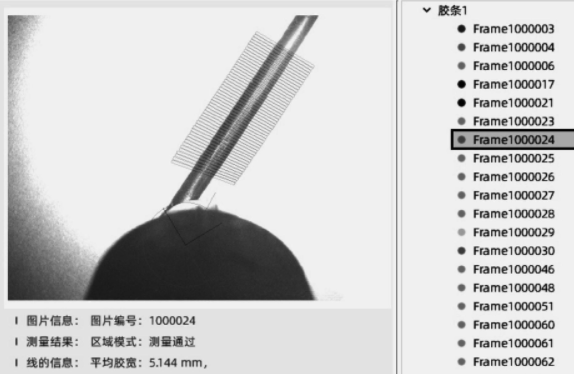
6.如权利要求1所述曲线状待测物视觉检测结果的显示方法,其特征在于:所述显示框内能显示图片编号。
7.如权利要求1所述曲线状待测物视觉检测结果的显示方法,其特征在于:选中所述显示框时,其对应位置的图像及检测结果会同时出现在屏幕上。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























