本发明公开了某种基于机器视觉检测的机器人农业采摘装置,包括拼装轨道槽,所述拼装轨道槽上安装有机体,所述机体的上表面插设有收集管,所述收集管的侧壁上插设有固定管,所述固定管远离收集管的一端滑动插设有伸缩管,所述伸缩管远离固定管的一端安装有弧形支撑板,所述机体的上表面安装有多轴机械臂,所述多轴机械臂的上端转动安装有剪切电机。本发明通过将摄像模组设置在剪切头上能够更加准确的采摘果实,通过单口弹力收集网缓冲收集避免较大的冲击而损坏果实,同时通过收集管、缓冲器和斜面暂存屉之间的配合,进一步降低了冲击损坏的可能性,使得装置采摘更加智能化,无需人工操作,且更加可靠安全,增加采摘效率以及良率。
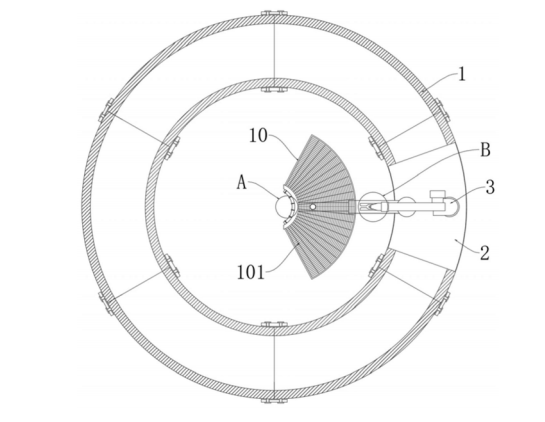
1.某种基于机器视觉检测的机器人农业采摘装置,包括拼装轨道槽(1),其特征在于,所述拼装轨道槽(1)上安装有机体(2),所述机体(2)的上表面插设有收集管(5),所述收集管(5)的侧壁上插设有固定管(7),所述固定管(7)远离收集管(5)的一端滑动插设有伸缩管(8),所述伸缩管(8)远离固定管(7)的一端安装有弧形支撑板(9),所述机体(2)的上表面安装有多轴机械臂(3),所述多轴机械臂(3)的上端转动安装有剪切电机(31),所述剪切电机(31)远离多轴机械臂(3)的一侧安装有剪切头(4),所述机体(2)内分别开设有存储腔(21)和功能腔(22),所述收集管(5)的下端穿过功能腔(22)延伸至存储腔(21)内。
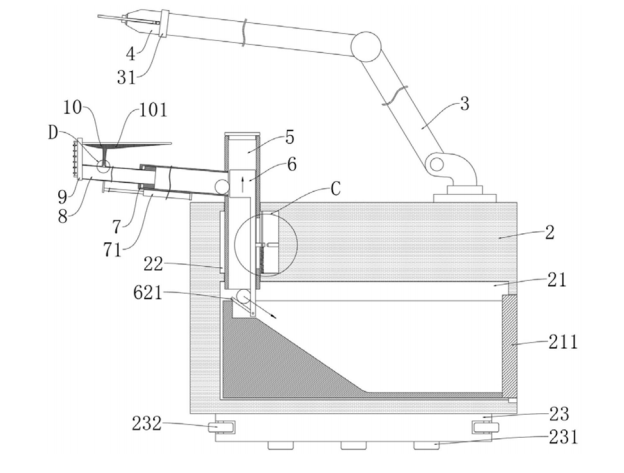
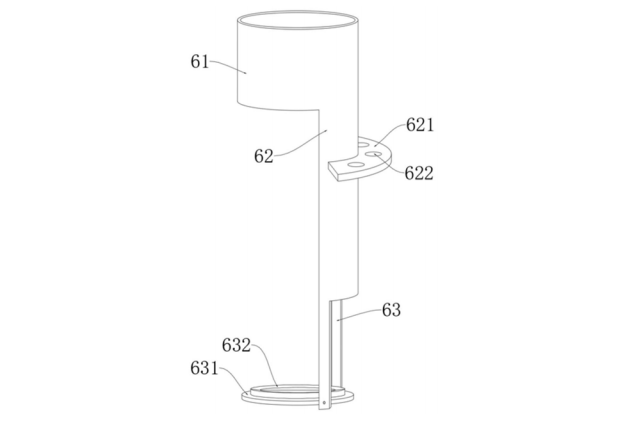
2.根据权利要求1所述的某种基于机器视觉检测的机器人农业采摘装置,其特征在于,所述收集管(5)内滑动插设有缓冲器(6),所述缓冲器(6)从上到下依次分为限位挡管(61)、弧形导片(62)和两个对称设置的弧形挂条(63),两个所述弧形挂条(63)的下端共同转动安装有缓冲盘(631),所述缓冲盘(631)的上表面安装有缓冲垫(632)。
3.根据权利要求2所述的某种基于机器视觉检测的机器人农业采摘装置,其特征在于,所述收集管(5)的侧壁上开设有滑口(51),所述弧形导片(62)的外侧壁上安装有弧形滑片(621),所述弧形滑片(621)穿过滑口(51)延伸至功能腔(22)内并等距开设有多个限位孔(622),所述功能腔(22)内等距安装有多个限位杆(221),多个所述限位杆(221)分别滑动插设在多个限位孔(622)内,每个所述限位杆(221)上均套设有分别固定在弧形滑片(621)和功能腔(22)底壁的复位弹簧(222),所述功能腔(22)的侧壁上安装有距离传感器(223)。
4.根据权利要求2所述的某种基于机器视觉检测的机器人农业采摘装置,其特征在于,所述存储腔(21)内滑动安装有斜面暂存屉(211),所述斜面暂存屉(211)的内斜面边缘位于缓冲盘(631)的轴线和边缘线之间,两个所述弧形挂条(63)之间的距离小于缓冲盘(631)的直径。
5.根据权利要求1所述的某种基于机器视觉检测的机器人农业采摘装置,其特征在于,所述固定管(7)的外侧壁上固定安装有可控伸缩杆(71),所述可控伸缩杆(71)的伸缩端固定在伸缩管(8)的外侧壁上,所述弧形支撑板(9)靠近伸缩管(8)的一侧安装有扇形固定架(10),所述扇形固定架(10)的中间安装有单口弹力收集网(101),所述伸缩管(8)的外侧壁上插设有连接管(81),所述单口弹力收集网(101)的网口固定套设在连接管(81)上。
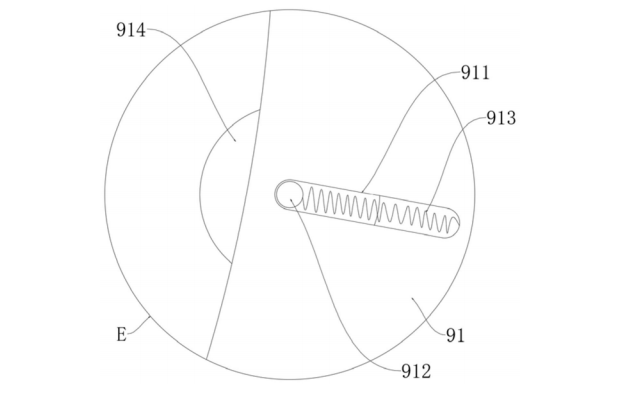
6.根据权利要求1所述的某种基于机器视觉检测的机器人农业采摘装置,其特征在于,所述弧形支撑板(9)远离伸缩管(8)的一侧对称安装有两个固定片(91),每个所述固定片(91)上均等距开设有多个圆端滑孔(911),任意对称的两个所述圆端滑孔(911)上均滑动插设有轴杆(912),每个所述轴杆(912)上均等距转动安装有多个支撑轮(914),每个所述轴杆(912)的两端侧壁均安装有固定在圆端滑孔(911)孔壁上的支撑弹簧(913)。
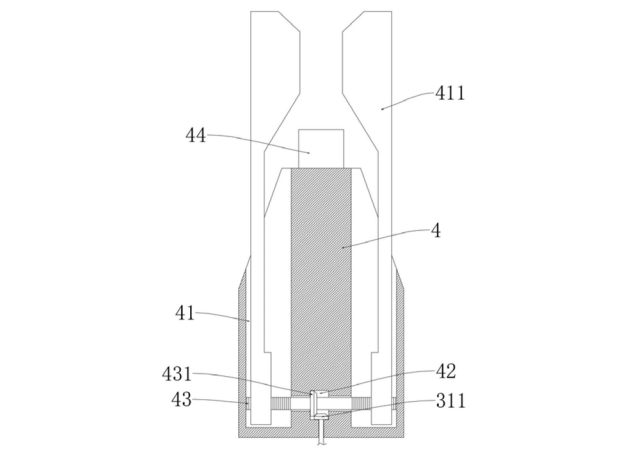
7.根据权利要求1所述的某种基于机器视觉检测的机器人农业采摘装置,其特征在于,所述剪切头(4)上对称开设有两个滑槽(41),每个所述滑槽(41)内均滑动插设有剪切板(411),每个所述剪切头(4)位于两个滑槽(41)之间开设有传动腔(42),所述传动腔(42)内转动安装有剪切轴(43),所述剪切轴(43)上安装有剪切锥齿轮(431),所述剪切轴(43)的两端分别延伸至两个滑槽(41)内并分别螺纹穿过两个剪切板(411)上并转动安装在两个滑槽(41)的槽壁上,所述剪切电机(31)的机轴延伸至传动腔(42)内并安装有动力锥齿轮(311),所述动力锥齿轮(311)与剪切锥齿轮(431)配合。

8.根据权利要求7所述的某种基于机器视觉检测的机器人农业采摘装置,其特征在于,所述剪切头(4)远离剪切电机(31)的一端安装有摄像模组(44),所述摄像模组(44)的中间安装有测距镜头(441),所述摄像模组(44)的边缘对称安装有两个广角镜头(442),两个所述广角镜头(442)之间的连接线与两个剪切板(411)之间的连接线垂直。
9.根据权利要求1所述的某种基于机器视觉检测的机器人农业采摘装置,其特征在于,所述机体(2)的下底壁面安装有驱动底盘(23),所述驱动底盘(23)的底部安装有多个行走轮(231),所述驱动底盘(23)的侧壁对称安装有多个导向轮(232),多个所述行走轮(231)与拼装轨道槽(1)的槽底壁接触,多个所述导向轮(232)与拼装轨道槽(1)的槽侧壁接触。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























