本发明公开了某种全自动化扶手旋铆设备,涉及旋铆设备技术领域,包括设备本体,设备本体上设有安全护栏和安全门,设备本体内且位于安全护栏内设有旋铆装置、视觉检测相机、工装夹具以及启停按钮,其中:旋铆装置包括旋铆底座与旋铆机;工装夹具安装于旋铆机和视觉检测相机前,包括底座、导轨模组以及夹持模组;导轨模块包括导轨驱动件与滑轨;设备本体上还设有电气控制柜。本发明具有通过在设备本体上设置旋铆装置、视觉检测相机以及工装夹具,实现了工装的全自动夹持、输送、旋铆位置检测、旋铆,识别并检测出夹具夹持中的问题,具备防错功能,大大减少了停机时间,提高工作效率和提高产品合格率,具有安全性能高,自动化程度高的效果。
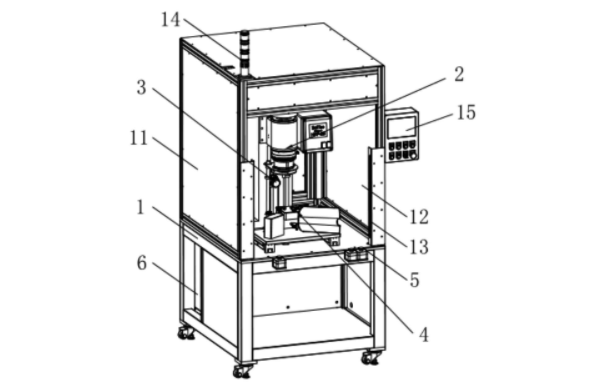
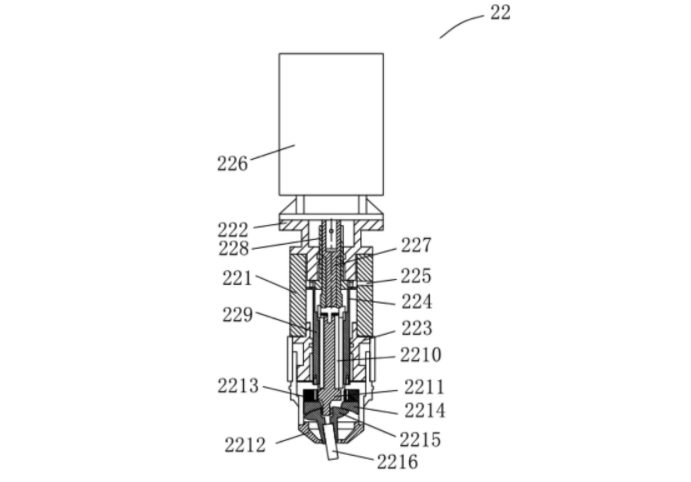
1.某种全自动化扶手旋铆设备,其特征在于,包括设备本体(1),所述设备本体(1)上设有安全护栏(11)和安全门(12),所述设备本体(1)内且位于安全护栏(11)内设有旋铆装置(2)、视觉检测相机(3)以及工装夹具(4),所述安全门(12)外设有控制旋铆装置(2)启停的启停按钮(5),其中:所述旋铆装置(2)包括旋铆底座(21)与旋铆机(22),所述旋铆机(22)与视觉检测相机(3)均安装于旋铆底座(21)上;所述旋铆机包括缸体(221)、设于缸体(221)上方的上固定座(222)、设于缸体(221)下方的下固定座(223),缸体(221)内设有活塞(224),缸体(221)上设有进液口(225),所述上固定座(222)的上方设有电机(226),所述电机(226)转轴下方设有联轴器(227),联轴器(227)套设有主轴(228),主轴(228)下设有下座(229),所述下座(229)内部设有偏心孔(2210),所述偏心孔(2210)内安装有偏心齿轴(2211),下固定座(223)的下方设有护锥套(2212),护锥套(2212)内设有内齿圈(2213),所述偏心齿轴(2211)在内齿圈(2213)内作梅花形轨迹转动,护锥套(2212)内还设有球体座(2214)和球面铆座(2215),球面铆座(2215)下方设铆接头(2216),所述球面铆座(2215)在偏心齿轴(2211)的带动下,围绕着球心原点做梅花形轨迹转动;所述旋铆装置(2)上旋铆头与视觉检测相机(3)均对准工装夹具(4)上预设旋铆位;所述工装夹具(4)安装于旋铆机(22)和视觉检测相机(3)前,包括底座(41)、导轨模组(42)以及夹持模组(43),所述底座(41)安装于所述导轨模组(42)上,夹持模组(43)安装于底座(41)上,所述夹持模组(43)包括夹持座(431)、至少一个夹持驱动气缸(432)以及夹持块(433),所述夹持座(431)安装于底座(41)上,所述夹持驱动气缸(432)安装于夹持座(431)旁,每个所述夹持驱动气缸(432)输出端连接夹持块(433),所述夹持块(433)位于夹持座(431)上方;所述导轨模块包括导轨驱动件(421)与滑轨(424),所述导轨驱动件(421)的输出端连接底座(41),所述底座(41)安装于滑轨(424)上;所述工装夹具(4)还包括第一传感器(44),所述第一传感器(44)安装于滑轨(424)内并位于底座(41)下方;所述设备本体(1)上还设有电气控制柜(6)。
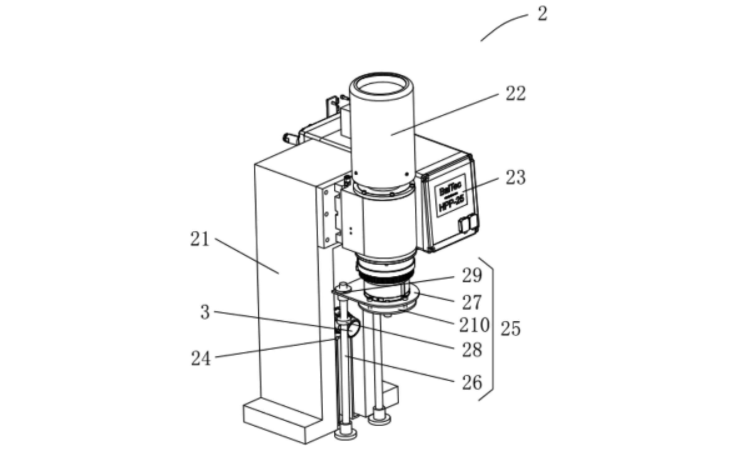
2.根据权利要求1所述的全自动化扶手旋铆设备,其特征在于,所述旋铆装置(2)还包括人机交互界面(23) ,所述人机交互界面(23)安装于旋铆底座(21)上;所述旋铆机(22)采用立式旋铆机(22);所述旋铆底座(21)设为倒字型结构,所述旋铆底座(21)上还设有第二传感器(24),所述第二传感器(24)朝向所述工装夹具(4)。
3.根据权利要求1所述的全自动化扶手旋铆设备,其特征在于,所述安全门(12)上还设有安全光栅(13) ,所述设备本体(1)顶部还设有报警灯(14) ,所述报警灯(14)采用三色灯。
4.根据权利要求1所述的全自动化扶手旋铆设备,其特征在于,所述设备本体(1)一侧还设有触摸屏(15)。
5.根据权利要求1所述的全自动化扶手旋铆设备,其特征在于,所述旋铆机(22)上旋铆头处设有导向机构(25),所述导向机构(25)包括导向柱(26)、导向板(27)以及定位环(28),所述导向柱(26)设置于旋铆底座(21)前,所述导向板(27)固定于旋铆头上,所述导向板(27)套设于导向柱(26)上,所述定位环(28)固定于导向柱(26)上;所述导向柱(26)与导向板(27)之间设有滑套(29) ;所述导向板(27)下方设有稳固板(210) ,所述稳固板(210)固定于铆接机铆接头上,所述稳固板(210)与所述导向板(27)之间通过螺栓可拆卸连接。
6.根据权利要求1所述的全自动化扶手旋铆设备,其特征在于,所述底座(41).上还设有至少一个支撑座(45) ,所述支撑座(45)安装于夹持座(431)旁,所述支撑座(45)的形状与工装的形状相匹配:所述夹持座(431)设为截面为L型结构的块状结构。
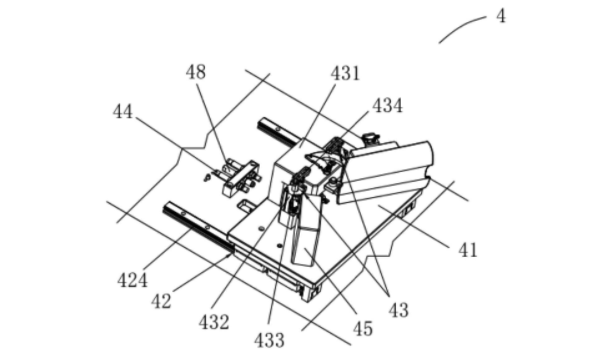
7.根据权利要求1所述的全自动化扶手旋铆设备,其特征在于,所述夹持块(433).上靠近夹持座(431)的一端设有缓冲垫(434)。
8.根据权利要求1所述的全自动化扶手旋铆设备,其特征在于,所述导轨驱动件(421)包括导轨气缸(422)与连接杆(423) ,所述导轨气缸(422)安装于底座(41)下方,所述导轨气缸(422)的输出端通过连接杆(423)连接底座(41)。
9.根据权利要求8所述的全自动化扶手旋铆设备,其特征在于,所述底座的底的部设有限位块(46)与两个竖直定位销(47),两个所述竖直定位销(47)安装于所述限位块(46)上,所述连接杆(423)连接所述限位块(46) ,所述底座上开设有若干与竖直定位销(47)相对应的限位孔;所述滑轨(424)之间设有横向定位销(48),所述横向定位销(48)的位置与两个竖直定位销(47)的中间空间位置相对应。

文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























