本发明公开了某种高效的物流卸货用自动码垛装置,其结构包括夹爪、辅助吸附组件、机械臂一、机械臂二、旋转台、升降台、滑道、货叉以及辅助固定组件;所述滑道上方滑动连接有升降台;所述升降台上表面固定有旋转台;所述旋转台上部安装有机械臂二;所述机械臂二底部嵌入设置有转座,所述转座两侧输出端均同轴固定有货叉;所述机械臂二中部位置内部嵌入设置有辅助固定组件;所述机械臂二顶部转动连接有机械臂一;所述机械臂一远离机械臂二的一端铰接有夹爪,所述夹爪的爪体内侧固定有至少一组辅助吸附组件。
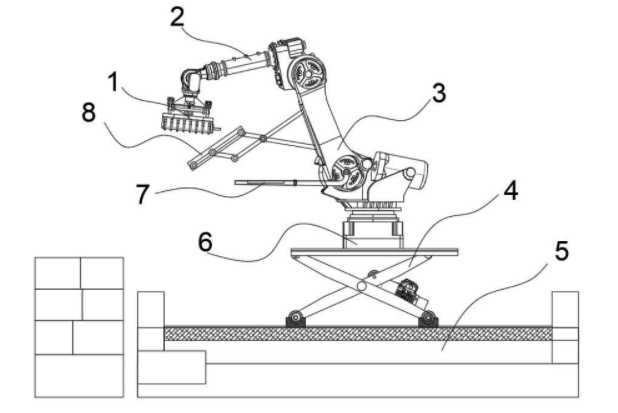
1.某种高效的物流卸货用自动码垛装置,包括夹爪(1)、辅助吸附组件(9)、机械臂一(2)、机械臂二(3)、旋转台(6)、升降台(4)、滑道(5)、货叉(7)以及辅助固定组件(8);其特征在于:所述滑道(5)上方滑动连接有升降台(4);所述升降台(4)上表面固定有旋转台(6);所述旋转台(6)上部安装有机械臂二(3); 所述机械臂二(3)底部嵌入设置有转座,所述转座两侧输出端均同轴固定有货叉(7);所述机械臂二(3)中部位置内部嵌入设置有辅助固定组件(8);所述机械臂二(3)顶部转动连接有机械臂一(2);所述机械臂一(2)远离机械臂二(3)的一端铰接有夹爪(1)。
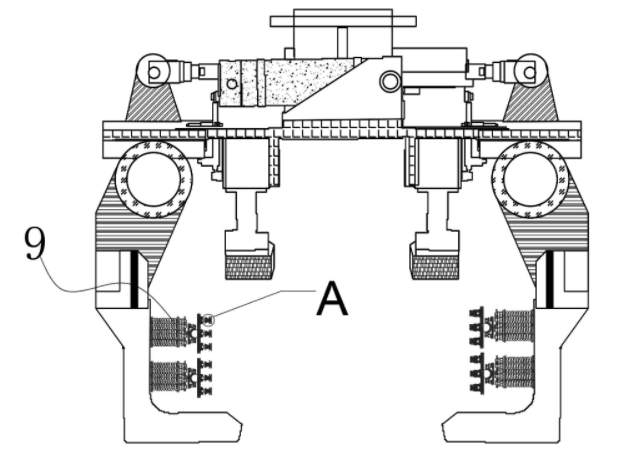
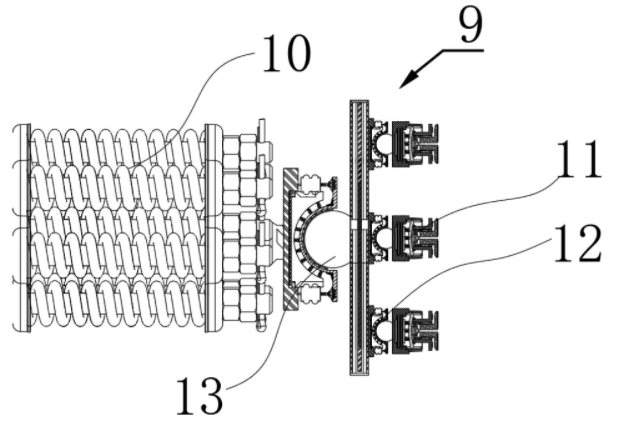
2.根据权利要求1所述的某种高效的物流卸货用自动码垛装置,其特征在于:所述夹爪(1)至少包括两个爪体,各个所述爪体上相互靠近的一侧均设置有至少一组辅助吸附组件(9),所述辅助吸附组件(9)包括弹簧伸缩杆(10)、吸附组件(11)以及铰接组件二(13);所述铰接组件二(13)一端固定在弹簧伸缩杆(10)上,另一端连接有吸板,所述吸板表面均匀焊接有至少一组铰接组件一(12);所述铰接组件一(12)远离所述吸板一侧铰接有吸附组件(11)。
3.根据权利要求2所述的某种高效的物流卸货用自动码垛装置,其特征在于:所述吸附组件(11)包括电磁铁(111)、弹簧一(112)、磁性元件(113)、外壳(117)以及吸盘组件;其中,所述外壳(117)内部嵌入固定有电磁铁(111),所述电磁铁(111)一侧均匀设置有至少一个弹簧一(112),所述弹簧一(112)另一端焊接有磁性元件(113),所述磁性元件(113)中部为半圆形磁性球体,所述磁性元件(113)远离弹簧一(112)的一侧可滑动的设置有吸盘组件。
4.根据权利要求3所述的某种高效的物流卸货用自动码垛装置,其特征在于:所述吸盘组件包括固定件(114)、吸盘(115)以及滑道(116);所述固定件(114)通过导向杆固定在所述外壳(117)内,所述导向杆贯穿通过磁性元件(113)尖端,所述固定件(114)为槽型,所述固定件(114)内壁开设有至少一条沿其轴向方向延伸的滑道下方设置(116),所述滑道(116)通过滑块滑动连接有吸盘(115),所述吸盘(115)中心处水平贯穿设置有通气孔。
5.根据权利要求2所述的某种高效的物流卸货用自动码垛装置,其特征在于:所述铰接组件一(12)与铰接组件二(13)结构相同,均包括气囊(121)、连接杆(122)、铰接球(123)、环形件(124)、弹簧二(125)以及铰接座(126);其中,所述铰接座(126)的一侧采用多个所述弹簧二(125)与所述环形件(124)相连,所述环形件(124)内部同轴设置有铰接球(123),所述环形件(124)靠近所述铰接座(126)的一端圆周阵列铰接有多个所述连接杆(122),各个所述连接杆(122)的另一端均连接有所述气囊(121),所述气囊(121)的另一端连接在所述铰接座(126)上,且各个所述气囊(121)之间采用管体串接连通设置。
6.根据权利要求1所述的某种高效的物流卸货用自动码垛装置,其特征在于:所述辅助固定组件(8)包括连杆一(81)、丝杆一(82)、丝杆二(83)、连杆二(84)、连杆三(85)以及连杆四(86);其中,所述机械臂二(3)内部嵌入设置有丝杆一(82)、丝杆二(83),所述丝杆一(82)以及丝杆二(83)的输出端均通过滑块分别铰接有连杆三(85)和连杆二(84);所述连杆三的另一端铰接有连杆四(86),所述连杆四(86)的另一端铰接至连杆一(81)的中部,所述连杆一(81)的一端还与连杆二(84)相铰接,所述连杆二(84)还与连杆三(85)呈剪状相铰接; 所述连杆一(81)顶部焊接有承重板。
7.根据权利要求1所述的某种高效的物流卸货用自动码垛装置,其特征在于:所述货叉(7)内部嵌入设置有伸缩杆,采用低碳钢管烤漆。

8.根据权利要求4所述的某种高效的物流卸货用自动码垛装置,其特征在于:所述吸盘(115)靠近货物的一侧内部设置有密封圈,所述固定件(114)靠近货物的一端固定有与所述密封圈相对应的密封凸台。
9.某种高效的物流卸货用自动码垛装置的使用方法,其特征在于:其包括以下步骤: S1.码垛装置通过滑道移动到货物装载地点,转动旋转台至适宜角度,控制机械臂一和机械臂二的旋转,使得夹爪便于抓取货物; S2.控制辅助吸附组件中的铰接组件二转动,使得吸盘可灵活吸附不同形状的货物表面; S3.先控制丝杆一和丝杆二上的滑块进行同步滑动,驱动承重板向上移动接近货物底部;之后再分别控制丝杆一与丝杆二上的滑块进行相对滑动,带动连杆装置变形,使其承重板贴合货物底部,达到托扶维稳效果; S4.卸取货物时,码垛装置通过滑道移动到卸货地点,旋转台转到适宜角度,旋转机械臂一和机械臂二,移动夹爪至卸货位置时,释放货物。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























