本发明公开了某种机器人打磨视觉在线检测系统,属于在线检测技术领域。机器人打磨视觉在线检测系统,包括工作台和视觉检测机构,工作台外壁连接有支撑柱,支撑柱外壁连接有电机座,电机座外壁连接有驱动机构,工作台两侧外壁均连接有侧板,工作台外壁两侧均开凿有凹槽,两个凹槽内壁分别连接有第一转轴和第二转轴,第一转轴与驱动机构相连,第一转轴和第二转轴外壁均套接有输送辊,两个输送辊之间连接有输送带,输送带外壁连接有打磨件,工作台两侧外壁均连接有支撑板,支撑板外壁开凿有滑槽,滑槽内壁滑动连接有滑块;本发明可调节相机与待测打磨件表面所需距离,使相机拍摄完整打磨面,以获得最佳的成像效果,保证工件检测的准确性。
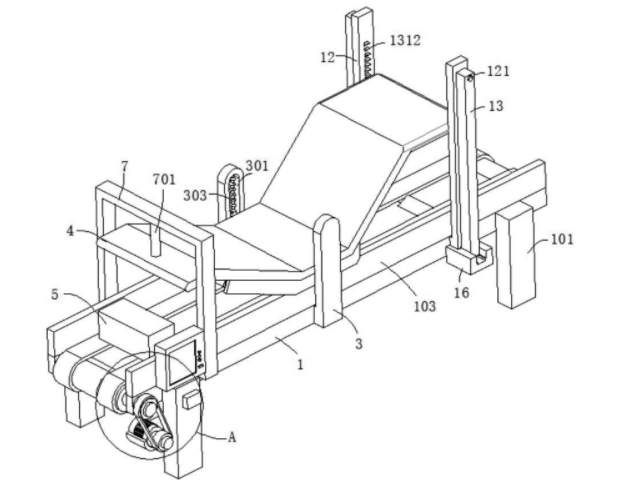
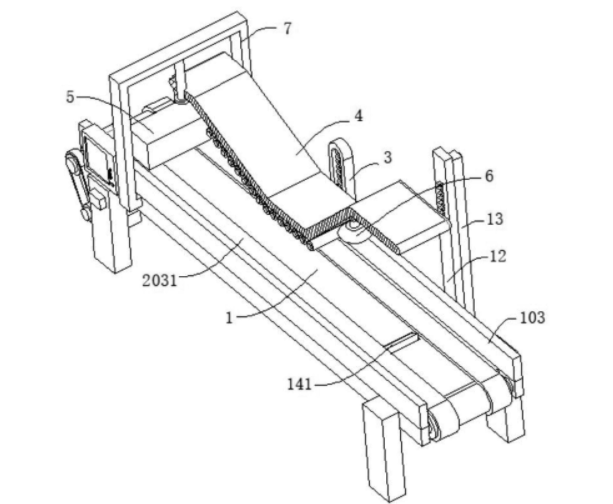
1.机器人打磨视觉在线检测系统,包括工作台(1)和视觉检测机构,所述工作台(1)外壁连接有支撑柱(101),其特征在于,所述支撑柱(101)外壁连接有电机座(102),所述电机座(102)外壁连接有驱动机构,所述工作台(1)两侧外壁均连接有侧板(103),所述工作台(1)外壁两侧均开凿有凹槽(2),两个所述凹槽(2)内壁分别连接有第一转轴(201)和第二转轴(202),所述第一转轴(201)与驱动机构相连,所述第一转轴(201)和第二转轴(202)外壁均套接有输送辊(203),两个所述输送辊(203)之间连接有输送带(2031),所述输送带(2031)外壁连接有打磨件(5),所述工作台(1)两侧外壁均连接有支撑板(3),所述支撑板(3)外壁开凿有滑槽(301),所述滑槽(301)内壁滑动连接有滑块(302),所述滑块(302)与滑槽(301)的内壁之间连接有第一弹性元件(303),两个所述滑块(302)之间连接有抬升板(4),且所述打磨件(5)与抬升板(4)的底壁活动相抵,所述视觉检测机构包括CCD相机(6),所述CCD相机(6)连接在抬升板(4)的底壁,所述工作台(1)外壁还连接有定位机构,所述抬升板(4)外壁开凿有与定位机构相配合的定位孔(401)。
2.根据权利要求1所述的机器人打磨视觉在线检测系统,其特征在于,所述工作台(1)的外壁连接有U形框(7),所述U形框(7)的内壁连接有固定杆(701),所述抬升板(4)滑动连接在固定杆(701)的外壁。
3.根据权利要求2所述的机器人打磨视觉在线检测系统,其特征在于,所述抬升板(4)包括第一斜板(402)、平板(403)和第二斜板(404),所述第一斜板(402)和平板(403)两侧外壁均连接有连接板(10),两个所述连接板(10)之间连接有固定轴(11),所述固定轴(11)外壁连接有辅助辊(111)。
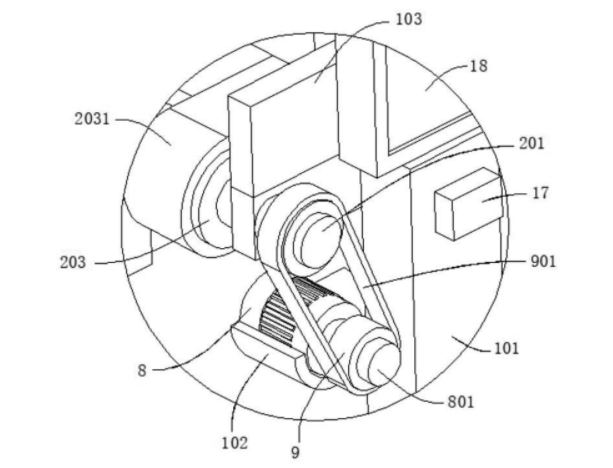
4.根据权利要求1所述的机器人打磨视觉在线检测系统,其特征在于,所述驱动机构包括驱动电机(8),所述驱动电机(8)固定连接在电机座(102)的外壁,所述驱动电机(8)的输出端连接有输出轴(801),所述输出轴(801)与第一转轴(201)外壁连接有相配合的同步轮(9),两个所述同步轮(9)之间连接有同步带(901)。
5.根据权利要求1所述的机器人打磨视觉在线检测系统,其特征在于,所述定位机构包括固定板(12),所述固定板(12)固定连接在工作台(1)的外壁,所述固定板(12)外壁活动连接有定位板(13),所述定位板(13)内开凿有定位槽(131),所述定位槽(131)内壁连接有第二弹性元件(1311),所述第二弹性元件(1311)远离定位槽(131)内壁的一端连接有定位杆(1312),所述定位杆(1312)远离第二弹性元件(1311)的一端穿过固定板(12)并活动连接在定位孔(401)内。

6.根据权利要求5所述的机器人打磨视觉在线检测系统,其特征在于,所述工作台(1)外壁开凿有活动槽(14),所述活动槽(14)内壁活动连接有活动块(141),所述活动块(141)与活动槽(14)的内壁之间连接有伸缩杆(142),所述活动块(141)外壁设置有斜面,所述斜面与打磨件(5)活动相抵,所述活动槽(14)内壁连接有气囊(143),所述工作台(1)内还开凿有工作槽(15),所述气囊(143)的输出端与工作槽(15)相互连通,所述工作槽(15)内壁活动连接有活塞(151),所述活塞(151)外壁连接有移动杆(152),所述移动杆(152)远离活塞(151)的一端依次穿过工作台(1)和固定板(12)并与定位板(13)相连,所述移动杆(152)外壁套接有第三弹性元件(1521),所述第三弹性元件(1521)的两端分别与工作台(1)和定位板(13)相连。
7.根据权利要求6所述的机器人打磨视觉在线检测系统,其特征在于,所述工作台(1)外壁连接有轨道板(16),所述定位板(13)活动连接在轨道板(16)内,且所述定位板(13)的底部通过销轴转动连接有滚轮(132)。
8.根据权利要求6所述的机器人打磨视觉在线检测系统,其特征在于,所述固定板(12)外壁连接有导向杆(121),所述定位板(13)滑动连接在导向杆(121)的外壁。

9.根据权利要求1所述的机器人打磨视觉在线检测系统,其特征在于,所述视觉检测机构还包括图像处理模块(17)和显示屏(18),所述图像处理模块(17)和显示屏(18)均连接在支撑柱(101)的外壁,所述图像处理模块(17)与CCD相机(6)电性连接,所述图像处理模块(17)的另一端与显示屏(18)相连。
10.根据权利要求9所述的机器人打磨视觉在线检测系统,其特征在于,所述图像处理模块(17)包括图形滤波模块、图像增强模块、图像分割模块以及图像边缘检测模块。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























