本发明属于物料贮存及运输技术领域,特别涉及一种板条箱、装箱机器人工作站及装箱方法。板条箱包括箱体和弹性支撑,箱体的底部设有开口及多个弹性支撑,开口用于薄板工件在箱体内进行码垛或拆垛时的托举口;装箱机器人工作站包括机器人、智能端拾器、转运车、举升器及板条箱,智能端拾器设置于机器人的执行末端,举升器设置于转运车上,在板条箱内进行码垛或拆垛时,举升器在箱体底部的开口处伸出且对薄板工件进行托举,使薄板工件处于弯曲状态。本发明避免洁净机器人空间运动轨迹精度造成薄板工件与板条箱的磕碰和摩擦,适合洁净机器人及其端拾器的薄板在板条箱内码垛和拆卸垛
1.某种板条箱,其特征在于,包括箱体和弹性支撑(93),所述箱体的底部设有开口(95)及多个弹性支撑(93),所述开口(95)用于薄板工件(3)在箱体内进行码垛或拆垛时的托举口。

2.根据权利要求1所述的板条箱,其特征在于,所述箱体为长方体结构,包括底板(94)及设置于底板(94)上的两个短侧板(91)和两个长侧板(92) ,所述开口(95)设置于所述底板(94)的中心位置;所述弹性支撑(93)为条形结构,且沿宽度方向设置于所述底板(94)上。
3.根据权利要求2所述的板条箱,其特征在于,两个所述短侧板(91)的内侧壁上涂覆有弹性高摩擦涂层。
4.某种装箱机器人工作站,其特征在于,包括机器人(1)、智能端拾器(2)、转运车(4)、举升器(5)及板条箱(9) ,其中板条箱(9)包括箱体和弹性支撑(93) ,所述箱体的底部设有开口(95)及多个弹性支撑(93);智能端拾器(2)设置于机器人(1)的执行末端,用于对薄板工件(3)的拾取及在所述板条箱(9)内进行码垛或拆垛;转运车(4)用于对所述板条箱(9)进行转运;举升器(5)设置于转运车(4)上,在所述板条箱(9)内进行码垛或拆垛时,举升器(5)在所述箱体底部的开口(95)处伸出且对薄板工件(3)进行托举,使薄板工件(3)处于弯曲状态。
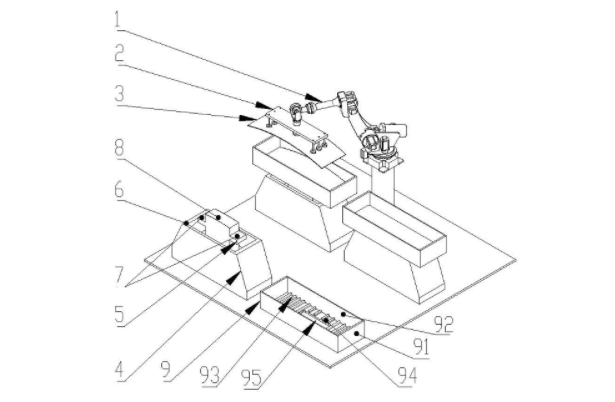
5.根据权利要求4所述的装箱机器人工作站,其特征在于,所述举升器(5)包括举升器挠曲支撑面(8)及对称设置于所述举升器挠曲支撑面(8)两侧的举升器平支撑面(7);举升器平支撑面(7)低于举升器挠曲支撑面(8) ,用于对所述板条箱(9)的底部定位;举升器挠曲支撑面(8)用于托举薄板工件(3)。
6.根据权利要求4所述的装箱机器人工作站,其特征在于,所述转运车(4)的顶部设有转运车上支撑面(6) ,转运车上支撑面(6)在运输时支撑所述板条箱(9)。
7.根据权利要求4所述的装箱机器人工作站,其特征在于,所述箱体为长方体结构,包括底板(94)及设置于底板(94)上的两个短侧板(91)和两个长侧板(92),所述开口(95)设置于所述底板(94)的中心位置;所述弹性支撑(93)为条形结构,且沿宽度方向设置于所述底板(94)的底部。

8.根据权利要求7所述的装箱机器人工作站,其特征在于,两个所述短侧板(91)的内侧壁上涂覆有弹性高摩擦涂层。
9.某种利用如权利要求4-8任一项所述的装箱机器人工作站的装箱方法,其特征在于,包括以下几个步骤:1)将板条箱(9)放置于转运车(4).上,板条箱(9)底部的开口(95)与举升器(5)相对应;2)举升器(5)伸出,通过举升器平支撑面(7)托举板条箱(9),举升器挠曲支撑面(8)从板条箱(9)底部的开口(95)伸出至板条箱(9)内;3)机器人(1)通过智能端拾器(2)拾取薄板工件(3)在板条箱(9)内进行码垛,薄板工件(3)通过举升器挠曲支撑面(8)支撑,形成弯曲状态,从而使薄板工件(3)的两端不与板条箱(9)的两端内壁接触:4)完成码垛后,举升器(5)缩回转运车(4)内,使板条箱(9)的底部与转运车(4)的转运车上支撑面(6)接触,同时薄板工件(3)完全落入板条箱(9)内,且两端与板条箱(9)的两端内壁接触。

文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























