本发明提供某种全自动化集装箱码头的地面锁站系统,其中地面锁站系统包括解锁站作业车道及解锁站;解锁站作业车道由海侧向陆侧依次布置并划分为三大区域,分别为靠岸桥侧的解锁站工作车道区、陆侧的超车道区和解锁前后缓冲区,解锁车辆依次通过前解锁缓冲区、工作区、解锁缓冲区完成整个解锁动作,解锁站由多个可移动人工作业室和用于停放智能运输车辆进行解挂锁作业的解锁区组成;通过安全管控将自动化作业区与人工作业区进行时间隔离与空间隔离进行解锁。本发明解锁站进行了模块化设计,能够安全高效地进行拆解锁的完整流程,可以应用于各个需拆卸锁的自动化运行智能运输车辆车道上,也可灵活地布置于有类似工况流程需要的相应关口。
1.某种全自动化集装箱码头的地面锁站系统,其特征在于,包括解锁站作业车道和解锁站,所述解锁站作业车道划分为三大区域,分别为靠岸桥侧的解锁站工作车道区、陆侧的超车道区和解锁前后缓冲区;所述解锁站由解锁区和多个可移动人工作业室组成,解锁区用于停放智能运输车辆进行解挂锁作业,所述可移动人工作业室用于工作人员在不进入车道的情况下,完成连接锁的拆卸或安装工作,在船舶作业前根据船舶停靠位置布置在船舶作业对应解锁站工作车道区域,码头地面施划人工作业室定位标线,用于人工作业室定位;地面锁站系统将自动化作业区与人工作业区通过时间隔离与空间隔离进行管控。
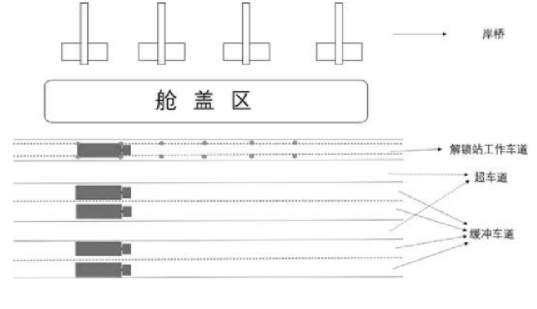
2.根据权利要求1所述全自动化集装箱码头的地面锁站系统,其特征在于,所述解锁站作业车道,由海侧向陆侧依次布置7条单向通行的作业车道,其中第1作业车道为解锁站工作车道;第2作业车道、第5作业车道为超车道;第3作业车道、第4作业车道、第6作业车道、第7作业车道为缓冲车道,7条作业车道宽度相同;其中的缓冲车道由车队管理系统调度成不同功能的作业道。
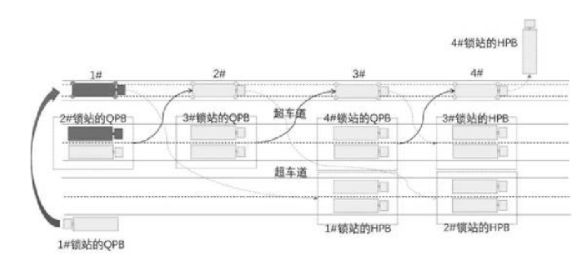
3.根据权利要求1所述全自动化集装箱码头的地面锁站系统,其特征在于,在工作车道上共布置16个锁站预设位,由车队管理系统进行调度,分配相应数量的人工作业室完成集装箱解挂锁作业。
4.根据权利要求2所述全自动化集装箱码头的地面锁站系统,其特征在于,所述缓冲车道,由车队管理系统调度分配为解锁前缓冲区和解锁后缓冲区;各缓冲区对应解锁站,准备进入锁站的车辆位于解锁前缓冲区等待,完成解锁的车辆进入解锁后缓冲区完成出站准备。
5.根据权利要求1所述全自动化集装箱码头的地面锁站系统,其特征在于:所述地面锁站系统工作流程如下: S1.根据智能运输车辆的移动方向,当智能运输车辆驶入解锁区时对其精准定位,使智能运输车辆到达解锁区进行解锁操作; S2.车辆到达解锁站后,作业人员使用设备开始解锁作业;人工作业室内设有工人进行拆挂锁和其他人工干预作业的信息化设备; S3.解/挂锁过程完成后,经信号确认,智能运输车辆自动驶离解锁站,进入下一流程; 其中,人工作业室内装有紧急停止开关及拆装锁头完成提示按钮;紧急停止开关用以处理应急状态并紧急停车,以及触发对智能运输车辆的指令。
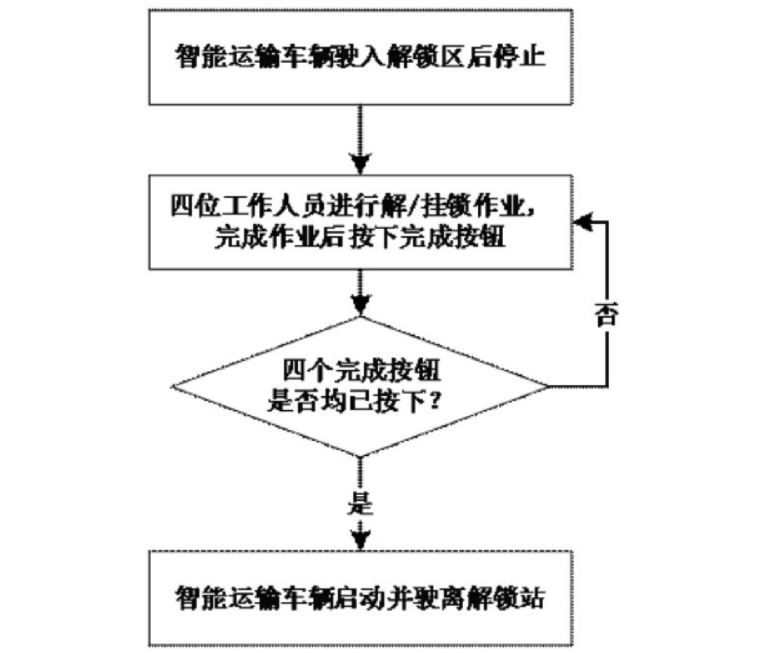
6.根据权利要求1所述全自动化集装箱码头的地面锁站系统,其特征在于,所述时间隔离的方法是,当一辆智能运输车辆驶入解锁区相应位置后停止行驶,即当前自动化作业停止并准备开始人工作业;四位工作人员开始进行解/挂锁作业,每位工作人员完成作业任务后按下完成按钮,当四位工作人员均按下完成按钮后,表示当前人工作业已完成并继续自动化作业,提示智能运输车辆启动并驶离解锁站。
7.根据权利要求1所述全自动化集装箱码头的地面锁站系统,其特征在于,所述空间隔离的方法,在智能运输车辆的行车道两边共布置四个可移动人工作业室,同侧可移动人工作业室之间以活动栏杆连接,并隔离出解锁区,实现了自动化作业区与人工作业区的空间隔离。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























