本发明涉及电梯检验检测领域,特别涉及某种电梯曳引轮轮槽三维尺寸检测方法。本发明公开了一种电梯曳引轮轮槽三维尺寸检测方法,包括以下步骤:a.检测前的准备;b.获得激光轮廓曲线照片;c.提取轮廓曲线;d.建立三维几何模型;e.提取轮槽的体征几何数据;f.缺陷定位。本发明能够在无接触曳引轮的条件下进行视觉检测,不破坏轮槽原有表面的情况下,对曳引轮轮槽表面尺寸的360°全方位检测,检测数据全面。
1.某种电梯曳引轮轮槽三维尺寸检测方法,其特征在于,包括以下步骤: a.检测前的准备:通过调节激光发射模块的位置,激光发射模块使曳引轮上显现一条沿所述曳引轮轴向延伸的轮廓曲线,通过调节拍照模块的位置,使拍照模块的相机拍到激光投射到曳引轮的轮廓曲线,将安装标记块安装在所述曳引轮上; b.获得激光轮廓曲线照片:运转所述曳引轮,拍照模块对所述曳引轮连续拍照,获得曳引轮的轮槽表面激光轮廓线照片,选择曳引轮一圈内轮槽表面激光轮廓线照片; c.提取轮廓曲线:选择曳引轮连续旋转一周的轮廓曲线为一组,提取激光轮廓线照片的轮廓曲线尺寸数据; d.建立三维几何模型:依据所述曳引轮外圆的直径和激光轮廓线照片的轮廓曲线尺寸的数据,对轮槽尺寸进行三维重构; e.提取轮槽的体征几何数据:对三维几何模型数据,针对各个轮槽截面曲线进行拟合分析,计算出轮槽角度γ,槽底拟合圆直径D、轮槽切口角度β、槽底宽度W、槽底拟合圆圆心距曳引轮边缘距离t,判断所提取的数据; f.缺陷定位:将轮槽的体征几何数据与标准数据对比,根据数据对比找出具体定位的缺陷位置。
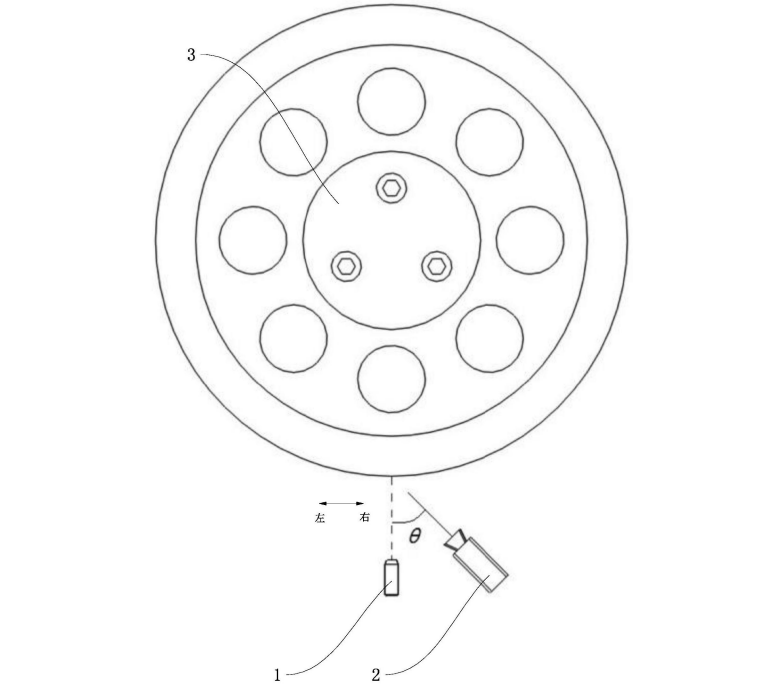
2.根据权利要求1所述的某种电梯曳引轮轮槽三维尺寸检测方法,其特征在于,所述的步骤a中激光发射模块使所述曳引轮上显现一条沿所述曳引轮轴向延伸的轮廓曲线:保持激光发射模块和拍照模块位置相对不变,左右调节激光发射模块和拍照模块,使激光轮廓线投射到曳引轮下方不同的部位,拍摄到不同部位的含有激光轮廓线的曳引轮照片,在曳引轮照片中测得轮槽槽深对应的像素点n,找出像素点n最小的曳引轮照片,该曳引轮照片对应的拍摄位置认为是激光发生器位于曳引轮正下方位置,此时激光方向穿过曳引轮轴心。
3.根据权利要求1所述的某种电梯曳引轮轮槽三维尺寸检测方法,其特征在于,所述的步骤b中选择一组曳引轮连续旋转一周的轮廓曲线:拍摄的第一张照片编号为1,照片连续编号,拍摄的第N1张照片中首次出现含标记块的激光轮廓,当曳引轮继续旋转一圈使得第N2+1张照片中再次出现标记块的激光轮廓线且第N2张照片中无标记块时,选取第N1到第N2张为曳引轮一圈内轮槽表面激光轮廓线照片。
4.根据权利要求1所述的某种电梯曳引轮轮槽三维尺寸检测方法,其特征在于,所述标记块沿曳引轮的轴向设置有第三支架,安装标记块时将所述标记块第三支架与曳引轮的边缘贴合。
5.根据权利要求4所述的某种电梯曳引轮轮槽三维尺寸检测方法,其特征在于,所述的步骤c中提取激光轮廓线照片的轮廓曲线尺寸的数据:通过第三支架的实际长度方向尺寸,激光轮廓线照片中第三支架长度方向对应的像素点,第三支架的实际厚度方向尺寸,激光轮廓线照片中第三支架厚度方向对应像素点,得出曳引轮轴向转换系数和径向转换系数,以轮槽轮廓曲线的初始像素点为坐标原点,根据激光轮廓线照片轮廓曲线上,任意像素点位到坐标原点的轴向距离和径向距离,进而得到该任意像素点的坐标值。
6.根据权利要求1所述的某种电梯曳引轮轮槽三维尺寸检测方法,其特征在于,所述标记块与所述曳引轮磁力连接,使所述标记块可拆卸安装所述曳引轮上。
文章来源:互联网,倘若您发现本站有侵权或不当信息,请与本站联系,经本站核实后将尽快修正!





























