
























 小程序店铺
小程序店铺
设备布局
工艺流程
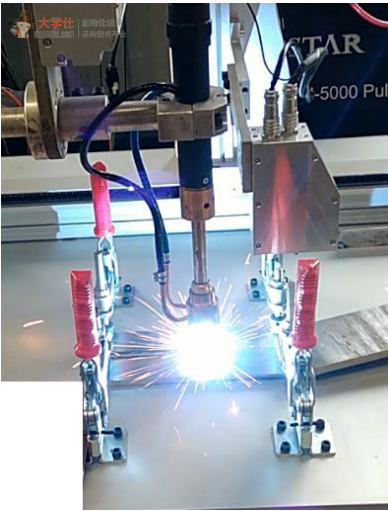
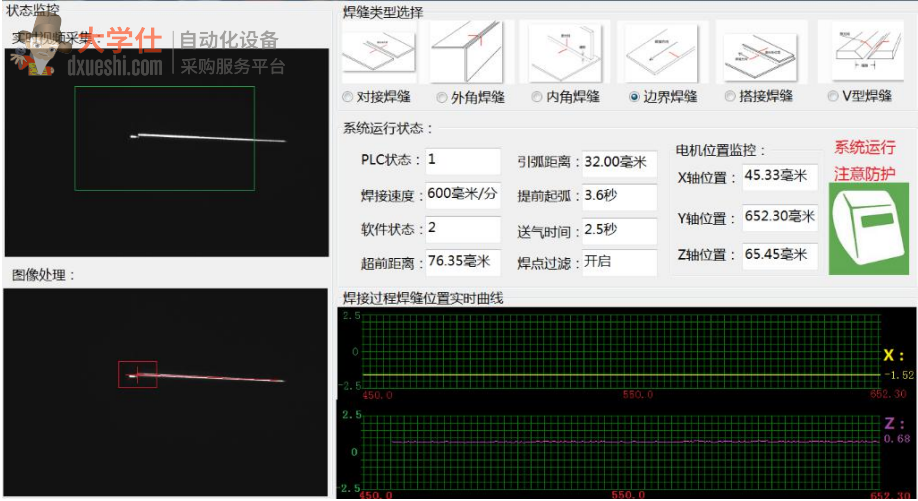
传统自动焊接专机在实际应用过程中,电弧的高低和左右位置,通常都需要人工参与做实时调节,由此给操作人员带来很大工作量,且产品焊接质量受人为因素干扰较多。传统焊枪纠偏方法 特点人工调节人工手动补偿偏差,补偿精度低;操作人员劳动强度大。接触式传感技术无坡口焊缝的工况无法使用;焊缝的点焊点位置会发生严重跳动;跟踪精度低,易出错。电弧跟踪技术仅适用于 PLASMA、TIG 焊接工艺,只能跟踪焊缝高低,焊缝左右位置需要人工补偿。鉴于上述问题,我司开发了激光视觉焊缝跟踪系统,由图像传感器采集实时图像并快速对图像做特殊处理,通过控制系统发出运动指令给执行机构,做相关运动执行,来实现对焊缝左右偏差和高度偏差的实时补偿。该系统能够自动寻找焊缝、自动识别焊缝并实时通过运动执行机构全程跟踪焊缝,补偿偏差量。该系统可集成到自动化焊接专机和机器人焊接系统中,可实现快速一键完成工件的焊接工作,全程无需人工介入,将操作人员从焊接过程中彻底解放出来,同时大大淡化了对人工操作技能的要求,提高了人工利用率,避免外界因素干扰造成产品质量缺陷。
项目成效
| 自动化解决方案 | 用工情况 | 产能(每8小时) | 良品率 |
| 实施前 | -- | -- | -- |
| 实施后 | -- | -- | -- |