

























 小程序店铺
小程序店铺
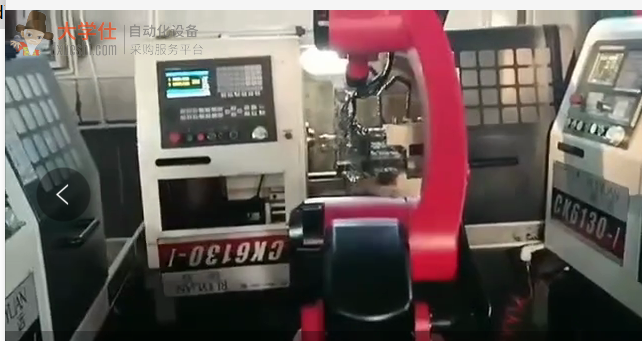

设备布局
工艺流程
一拖三车床上下料 1.数控车床自动上下料机器人的上料控制过程: 初始位置设定在上下料轨道的上方发出初位信号,就绪灯(HL2)亮,且手爪处于打开的状态。当机床需要上料时,向自动上下料机器人发出上料信号,升降汽缸得信号(YV2),两V型块上升,将曲轴2、3拐径顶起,然后机械手执行下降,机械手下降到右下位手爪闭合(抓取工件)、机械手上升、上升到右上位、左行、左行到左上位然后下降、下降的同时发给机床机械手运行区域信号(KA3),下降到左下位,PLC发出手爪打开信号(YV1),手爪打开将工件放到机床内。自动上下料机器人上升到左上位,同时发给机床机械手下料就绪信号(KA2),就绪灯(绿灯)亮,等待机床发给下料指令。 2.数控车床自动上下料机器人的下料控制过程: 当机床加工结束并打开机床门后,机床向机械手发出下料指令。自动上下料机器人下降的同时发给机床机械手运行区域信号(KA3),下降到左下位手爪闭合(抓取工件)、机械手上升、上升到左上位,右行,右行到右上位,升降汽缸得信号(YV2),两V型块下降至初始状态,同时自动上下料机器人下降,下降到右下位发出手爪阀打开信号(YV1),手爪打开,将工件放到上下料轨道上。机械手上升、上升到初位,就绪灯亮,准备就绪等待下一次工作。
项目成效
| 自动化解决方案 | 用工情况 | 产能(每8小时) | 良品率 |
| 实施前 | -- | -- | -- |
| 实施后 | -- | -- | -- |