

























 小程序店铺
小程序店铺
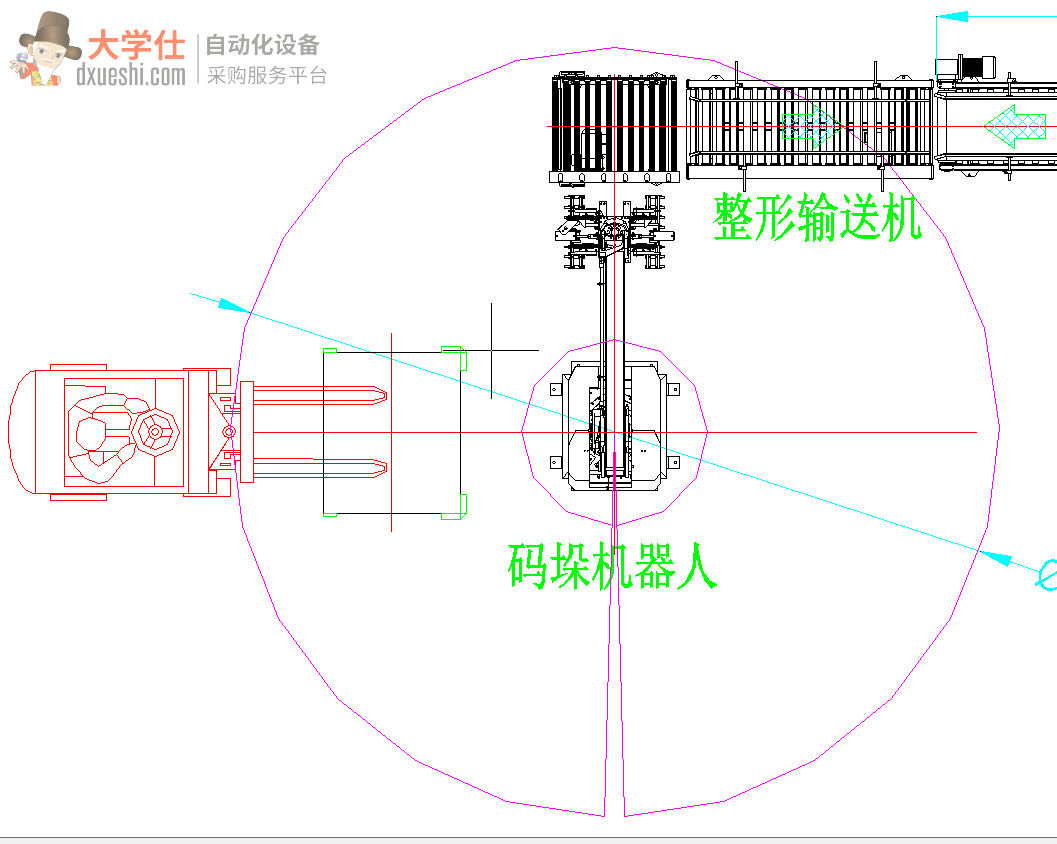

设备布局
工艺流程
使用四轴关节机器人解决纸箱的码垛 主要由底座、腰部转座、大臂、小臂、前臂、手座以及末端执行器等组成。其中腰部转座、大臂、前臂、末端执行器为主要活动部件。来料前,末端执行器会从当前位置运动至抓取等待点并打开抓手。通常,抓取等待点设置在来料点的正上方500mm处。来料时,码垛机器人将把末端执行器移送至箱子的到位点,并驱动气缸将抓手收拢,抓起纸箱,迅速抬升至一定高度后,转向托盘放置等待点(通常为放置点正上方一定距离)。进而降速在放置点打开气缸抓手,放下纸箱产品。在正确位置放置完纸箱产品之后,抬升一定距离,然后再转向抓取等待点,等待下一个来料信号,循环以上动作。整个过程中,码垛机器人的各个机构协调合作,完成整个码垛的任务。 经久耐用,具有调节的基础性功能,主升降平台采用缝式电机驱动器,进口速度输送带分离进料箱,堆料由辊式输送机输送。传送带输出物料。所有机器采用辊式输送机,采用德国西门子PLC控制系统,既可移动,又可与计算机连接,还能自动显示故障。
项目成效
| 自动化解决方案 | 用工情况 | 产能(每8小时) | 良品率 |
| 实施前 | -- | -- | -- |
| 实施后 | -- | -- | -- |